



버밍엄 대, 핵폐기물 처리 새로운 접근법 개발 VIDEO: Researchers develop new approach for handling nuclear waste




미국 회계감사원(Government Accountability Office)에 따르면 상업용 원자력 발전소에서 나온 사용후핵연료 85,000 미터톤과 미국 정부 무기 프로그램에서 나온 9,000만 갤런의 폐기물이 있다고 한다.
그 숫자는 빠르게 증가하고 있다. 매년, 우리는 2,000 미터톤의 사용후 핵연료를 추가한다. 핵폐기물을 처리하고 처리하는 것은 정밀성과 정확성이 요구되는 위험한 작업이다. 영국 버밍엄 대학의 익스트림 로보틱스 연구소가 이끄는 국립핵로보틱스 센터의 연구원들은 인간과 로봇이 함께 일을 할 수 있도록 돕는 방법을 찾고 있다.
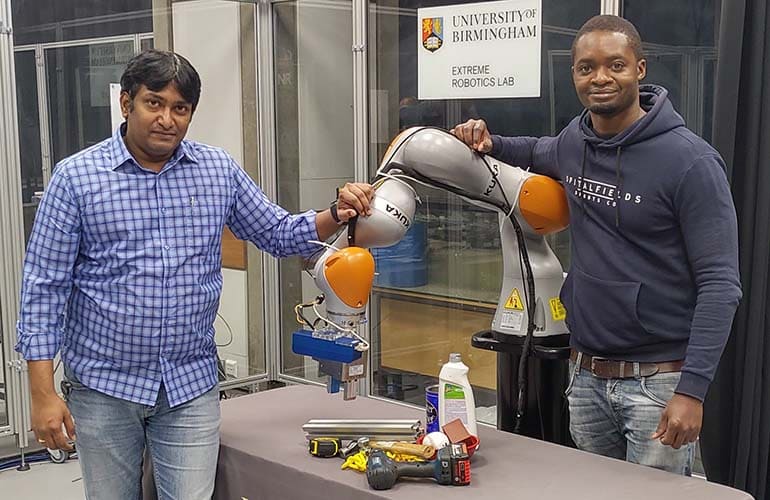
로봇공학 분야의 선임 연구 과학자 나레쉬 마르투리 박사(왼쪽)와 로봇공학 연구 엔지니어 막심 아지글레(오른쪽)는 핵폐기물을 더 잘 처리할 수 있는 시스템을 개발한 팀의 일원이었다.
연구자들은 물체를 다룰 때 평행 턱 그리퍼를 사용하는 표준 산업용 로봇과 그 주변의 세계를 볼 수 있는 엔센소 N35 3D 카메라를 사용하는 시스템을 개발했다. 그 팀의 시스템은 인간이 인공지능이 할 수 없는 더 복잡한 결정을 할 수 있도록 하는 반면, 로봇이 그 일을 가장 잘 수행할 수 있는 방법을 결정하는 것을 포함한다.
그 팀은 다음 세 가지 종류의 공유 통제를 사용한다.
첫 번째는 인간이 높은 수준의 결정을 내리는 반면 로봇은 이를 계획하고 실행하는 반자율성이다. 두 번째는 가변 자율로, 인간이 자율적인 움직임과 조이스틱으로 제어되는 직접적 움직임 사이에서 전환할 수 있다. 세 번째는 공유 제어로, 인간이 로봇 팔을 물체를 향해 움직이는 것과 같은 작업의 일부 측면을 원격 조작하는 반면, AI는 물체를 가장 잘 집어 들도록 그리퍼의 방향을 결정하는 것이다.
그 로봇에는 사람의 시야와 비슷한 공간 시야를 주는 엔센소의 3D 카메라가 장착되어 있다. 엔센소의 카메라는 두 대의 카메라가 약간 다른 위치에서 물체를 보도록 함으로써 작동한다. 그들은 내용은 비슷하지만 물체의 위치 차이를 보여주는 이미지를 캡처한다.
엔센소의 소프트웨어는 이 두 이미지를 결합하여 객체의 포인트 클라우드 모델을 만든다. 이 세상을 보는 방법은 로봇이 움직임을 더 정확하게 하도록 도와준다.
"신 클라우드는 우리 시스템에서 여러 안정적인 고정 위치를 자동으로 생성하는 데 사용된다. 3D 카메라에 포착된 점 구름은 고해상도이고 밀도가 높기 때문에 장면의 각 물체에 대해 매우 정밀하게 잡는 위치를 생성할 수 있다," 라고 국립핵로보틱스 센터의 선임 연구 과학자 나레쉬 마르투리 박사가 말했다.
이를 바탕으로 우리의 '히포테시스 랭킹 알고리즘'이 로봇의 현재 위치에 따라 다음 번 집어들 물체를 결정한다.
그 연구소의 연구원들은 현재 턱받이 대신 손가락이 여러 개인 손과 호환되는 시스템의 확장을 개발하고 있다. 그들은 또한 인공지능에 의해 로봇이 조종되는 완전한 자율적인 그립 방법을 연구하고 있다.
황기철 콘페이퍼 에디터 인플루언서
Ki Chul Hwang Conpaper editor influencer
