



뉴욕 대의 탠던 공대의 새로운 로봇VIDEO: NYU Tandon to launch a new robotics initiative focused on collaboration and improving urban living




뉴욕대 연구원, 협업과 도시 생활 개선에 촛점 맞춘
새로운 로봇 이니셔티브 출범 위해 새로운 길 개척하다
뉴욕 대학의 탠던 공대는 공학과 학문 분야로서 연구와 교수 모두에 독특한 접근을 약속하고 학교에서 수십 년간의 로봇 공학을 기반으로 하는 새로운 로봇 이니셔티브를 시작할 예정이다.
* 뉴욕 탠던 이공과대학교 NYU Tandon School of Engineering.
미국 뉴욕 주 뉴욕 시티 브루클린 구역에 있는 뉴욕대학교에 소속된 4년제 사립 대학교이다. 위키백과
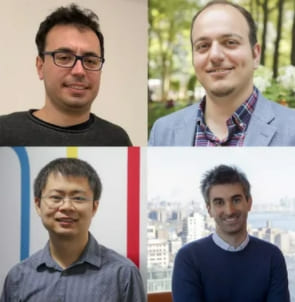
네 명의 로봇 공학자들이 뉴욕 대학교 탄돈에서 새로운 로봇 공학 이니셔티브의 주요 기획자로 일하고 있다. 왼쪽 위에서 시계방향으로 주세페 로이아노, S. 파로크 아타샤르, 루도비치 리게티, 첸 펭.뉴욕 탠던돈
몇 년간의 계획 끝에 세부 사항이 마무리됨에 따라, 우리는 새로운 계획의 주요 조직자로 활동하는 4명의 로봇 공학자와 대화할 기회를 가졌다. 이 새로운 계획은 12개 이상의 로봇학 교수진에서 기존의 탠던 공대 강점을 기반으로 구축될 것이며, 결국 탠던과 다른 분야의 추가 연구원들을 통합하는 방안을 모색할 것이다.
이 연구원들은 광범위한 로봇 프로그램에서 부서 간 협업을 위한 탠던 공대 딘 옐레나 코바체비치(Tandon Dean Jelena Kovachevic)의 비전을 정착시키기 위해 2017-2019년 2년간 "클러스터 채용"의 일환으로 뉴욕 대학교 탠던에 채용되었다.
그들의 연구가 자주 교차하고 프로젝트에서 종종 협력하지만, 이 연구자들 각각은 독특한 관점에서 로봇공학에 접근한다.
주세페 로이아노 Giuseppe Loianno

자율 로봇에 대한 인식, 학습, 제어에 대한 배경을 가진 주세페 로이아노는 특히 드론을 비롯한 공중 로봇에 대한 로봇 자율성을 탐구한다. 그는 Agile Robotics and Perception Lab(ARPL)을 이끌며, 또한 뉴욕대 와이어리스와 뉴욕대 커스프(NYU COPSP)의 일원이기도 하다. 연구소는 로봇 자율 분야에 대한 기초적이고 응용적인 연구를 수행해 외부 인프라에 의존하지 않고 비정형적이고 역동적으로 변화하는 환경에서 작동하며 경험을 통해 학습한 자율 행동을 개선할 수 있는 민첩한 자율기계를 만든다. Atashzar 및 Feng과 파트너십을 맺고 NSF가 지원하는 Aerial Co-Workers와 같은 프로젝트와 Army Research Laboratory 및 여러 산업과의 협력을 통해, 그의 연구소는 또한 로봇이 서로 및 인간과 보다 민첩하고 협력할 수 있는 방법을 조사하고 있다. 올해 초에 출판된 IEEE Spectrum에서 그의 연구에 대해 자세히 읽어보세요.
산 파로흐 아타샤르 S. Farokh Atashzar
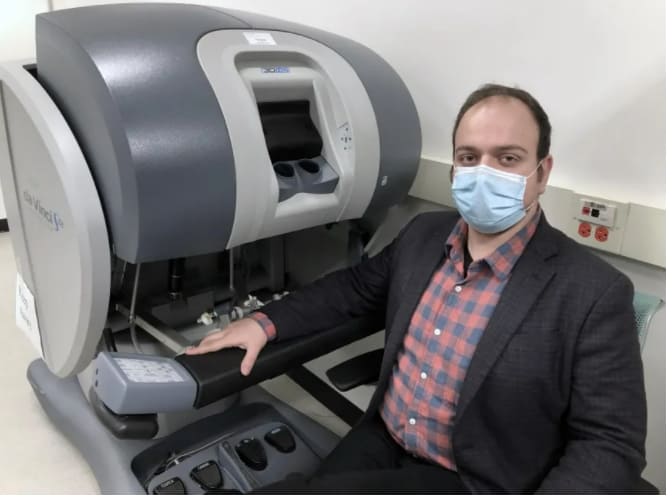
S. Farokh Atashzar는 현재 차세대 통신 기능과 결합된 원격 수술 및 원격 복구에 초점을 맞추고 있는 의료 및 웰니스 애플리케이션을 위한 사이버 물리 시스템 및 로봇 공학 개발에 자신의 직업 경력의 많은 부분을 바쳤다. 그는 최근에 직관적 재단으로부터 다빈치 연구 키트로 구성된 장비를 기증받았는데, 이 장치는 그의 팀이 다른 도시, 지역 또는 심지어 대륙의 다른 곳에 위치한 환자를 수술할 수 있는 방법을 고안해 낼 수 있는 수술 시스템이다. 뉴욕대 와이어리스(NYU WIRESSF)와 뉴욕대(NYU) 내 메디컬 로보틱스 및 인터랙티브 인텔리전트 테크놀로지스(MERIIT) 연구소를 이끄는 작업의 일환으로, 그는 또한 외골격계 장치 및 차세대 보철물과 재활에 직접 응용할 수 있는 최첨단 인간-기계 인터페이스 기술을 연구하고 있다.로봇에서. 그는 뉴욕대 의과대학 및 미국 식품의약국(FDA)과 활발한 협력을 발전시켰다. 그의 연구는 미국 국립 과학 재단의 지원을 받고 있다.
루도비치 리게티 Ludovic Righetti

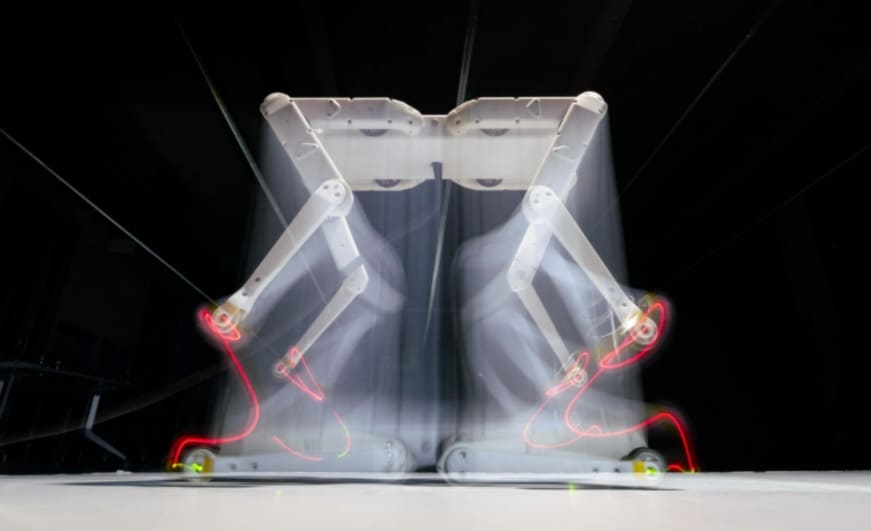
Ludovic Righetti는 NYU Tandon의 기계 인 모션 연구소를 이끌고 있다. 그곳에서, 그의 팀은 걷고 물체를 조작하는 로봇을 더 자율적이고, 다재다능하며 상호 작용하기에 안전하게 만드는 알고리즘을 발명했다. 기계 학습과 최적의 제어에 대한 그의 새로운 접근법은 물체 재료, 기능, 목적에 따라 강도, 힘 등을 변화시켜 환경 및 다양한 물체와 언제 어떻게 상호작용해야 하는지 "이해하는" 로봇을 만들 수 있다. 자율 기계 분야에서 새로운 가능성을 창조하는 것 외에도, 그는 엄청나게 비싼 네발 로봇의 저비용 오픈 소스 대안인 Solo 8과 12 프로젝트를 통해 더 많은 연구원들이 로봇을 이용할 수 있도록 만들고 있다. NYU Wireless에서 로봇공학과 무선통신이 교차하는 지점에 있는 그의 연구실에는 5G 링크를 통해 다리가 달린 로봇의 클라우드 기반 전신 제어를 고안하는 작업이 포함되어 있다.
천펑 Chen Feng

Chen Feng은 건설 및 제조를 위한 컴퓨터 비전 및 로봇 인식 응용 프로그램과 관련된 토목, 전기 및 지리 공간 공학에서의 자신의 경험을 가져왔다. NSF와 NYU Tandon의 C2SMART Tier 1 대학 교통 센터의 자금 지원을 통해, 그는 시각적 동시 국산화 및 매핑(vSLAM)과 딥러닝에 대한 전문 지식을 적용하여 자율 주행, 보조 생활 및 건설 로봇 기술을 개발했으며, 알고리즘 프로세스에 대한 여러 특허를 보유하고 있다. 이러한 응용 프로그램에 대해. 다학제 연구 그룹인 토목 자동화 및 인텔리전스(AI4)의 책임자로서CE) 그는 다분야 사용에서 영감을 받은 기초 연구를 통해 로봇 비전과 기계 학습을 발전시키고 있다. 한 예로, 집단적층제조(Collective Addition Manufacturing)는 자율 이동 로봇 팀이 대규모 3D 구조를 공동으로 인쇄할 수 있는 이론과 시스템을 개발하기 위한 협업 프로젝트이다. 또 다른 협업 프로젝트인 ARM4MOD는 물리적 표면에 정교한 시각적 지도를 투영할 수 있는 네발 로봇을 사용하여 설계에서 제작, 설치까지 모듈식 건물 건설을 간소화하는 것을 목표로 한다. 그는 또한 도시과학+진보센터(COPSP)에 소속되어 있다.
황기철 콘페이퍼 에디터 인플루언서
Ki Chul Hwang Conpaper editor influencer
(Source:
https://spectrum.ieee.org/nyu-tandon-robotics)
NYU Tandon School of Engineering

NYU Tandon School of Engineering - Top Ten Reasons to Attend
Recent Article
- [해외동향] 바레인 경전철(Bahrain Metr⋯
- 이 인간 얼른 잡아 가시고...절대 풀어⋯
- 문제 많은 '재건축 안전진단제도' 근본⋯
- 어떡하나! 정년 앞둔 60대 아버지 또사⋯
- [우려가 현실로] COVID-19: 가짜 백신⋯
kcontents
