



"세계 최초 미세 바늘까지 잡을 수 있는 코끼리 코 로봇 손 개발" 한국기계연구원




Construction, Science, IT, Energy and all other issues
Search for useful information through the top search bar on blog!
건설,과학,IT, 에너지 외 국내외 실시간 종합 관심 이슈 발행
[10만이 넘는 풍부한 데이터베이스]
블로그 맨 위 상단 검색창 통해 유용한 정보를 검색해 보세요!
[경과]
MIT, 소프트 로봇의 정확한 '파지' 기술 개발 VIDEO: Giving soft robots feeling
https://conpaper.tistory.com/87072
말미잘 모사 소프트 로봇 그리퍼 개발 Robotic gripping mechanism mimics how sea anemones catch prey l 청소·경비·안내 기능 갖춘 복합형 서비스 로봇 VIDEO: ロボットは人手不足を解消できるか 清掃+警備..
https://conpaper.tistory.com/84070
말미잘 모사 소프트 로봇 그리퍼 개발 Robotic gripping mechanism mimics how sea anemones catch prey l 청소·경
중국 칭화대, 말미잘 모사한 '적응적' 소프트 그리퍼 개발 '응용물리학 레터스'에 연구 성과 발표 바다에 살고 있는 말미잘을 모사한 소프트 로봇 그리퍼가 개발됐다. 바다에 사는 말미잘은 여러
conpaper.tistory.com
미세 바늘까지 잡을 수 있는
코끼리 코 로봇 손 세계 최초 개발
한방 침, 바늘 같이 매우 가늘거나 얇은 물체부터 박스 등 큰 물체까지 모두 잡을 수 있는 코끼리 코 그리퍼 로봇이 개발됐다.
과학기술정보통신부 산하 한국기계연구원(원장 박상진, 이하 기계연)은 코끼리가 물건을 잡을 때 작은 물체는 코 끝을 오므려 잡고 큰 물체는 코로 공기를 들이마시며 잡는 동작을 모사하여, 오므려 잡거나 흡착으로 잡는 동작이 모두 가능한 그리퍼*를 세계 최초로 개발했다고 밝혔다.
*그리퍼(Gripper): 물체를 쥐어 옮기거나 동작을 수행할 수 있도록 하는 장비
코끼리 코처럼 흡착과 오므려 잡기가 동시에 모두 가능한 그리퍼 개발
물건을 꼬집어 잡거나 흡착하여 다양한 크기의 물체 파지 가능

- ‘사람 같은’ 전자피부 로봇 VIDEO: Touchlab to begin piloting its robotic skin sensors in a hospital setting
- 물건을 쉽게 잡고 잡을 수 있는 가성비 좋은 로봇 손 Anthropomorphic Clone Hand grasping different objects2
기계연 AI로봇연구본부 로봇메카트로닉스연구실 송성혁 선임연구원 연구팀은 유연 구조체와 구조체의 변형을 만드는 와이어, 유연하고 얇은 벽으로 구성된 집게·흡착 융합형 코끼리 코 그리퍼를 개발했다. 복잡한 기계장치나 센서 없이도 잡은 물체를 파손 없이 안정적으로 파지하여 조립할 수 있을 뿐 아니라, 물품의 효과적인 이송까지 가능하여 다양한 분야에 적용 가능할 것으로 기대된다.
유연 구조체에는 내부에 진공을 만드는 여러 개의 미세 유로가 있어 그리퍼가 물체에 흡착할 수 있도록 도와준다. 이 각각의 미세 유로는 유연하여 물체 접촉 시 물체 형상과 일치하도록 변형된 후 밀착되기 때문에 유연 구조체 자체가 흡착용으로 작동한다.
이에 더하여, 구조체 중앙에 있는 변형 와이어를 잡아당기면 구조체가 반으로 접혀 물체를 오므려 잡으면서 집게용으로 작동한다. 이때 그리퍼가 오므러 들어 외곽에 위치한 유연한 벽이 물체 주변을 감싸고, 물체 주변을 밀폐하게 된다. 물체를 오므려 잡아 감싼 다음, 내부에 진공을 일으키는 과정을 통해 물체를 감싸 안는 힘을 크게 증가시킬 수 있어 높은 파지력을 갖는다.
그간 그리퍼는 집게형과 흡착형으로 별도 개발돼왔다. 집게형은 물체의 크기가 집게가 벌어지는 최대 크기보다 큰 경우 움켜잡을 수 없고, 흡착형은 다양한 크기의 물체를 파지할 수 있으나 바늘이나 실처럼 매우 가는 물체나 천, 겹쳐져 있는 종이처럼 얇아서 꼬집어 잡아야 하는 물체를 파지하기 어려웠다.
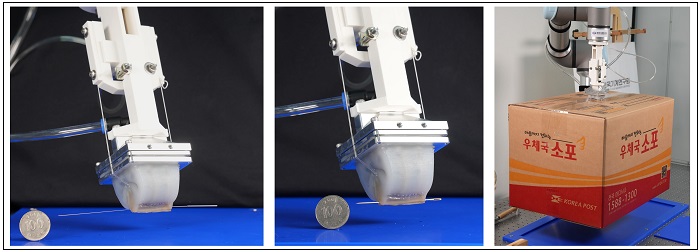
이번에 개발한 기종은 집게형과 흡착형의 파지 메커니즘을 동시에 활용해 다양한 크기와 형태를 가진 물체의 파지가 가능하다. 그리퍼의 100분의 1 크기보다 작은 한방 침(직경 0.25mm)을 바닥에서 집어 올리거나, 10배 크기인 박스에 흡착하여 들어 올리는 등 다양한 물체를 파지할 수 있다.
또한 집게처럼 오므려 잡는 과정에서도 복잡한 센서나 제어 없이 변형 와이어를 움직이는 공압 실린더를 단순히 켜고 끄는 동작만으로 다양한 물체 파지가 가능하다. 송성혁 선임연구원은 “말랑말랑한 그리퍼를 바닥에 밀착시킨 후, 진공을 만들어주면서 오므리는 동작을 동시에 수행하면 마치 손가락으로 바닥을 강하게 꼬집는 효과가 발생하기 때문에, 매우 가는 물체 파지까지 간단하게 가능하다“고 설명했다.
이러한 장점을 활용하여 인형을 선물 상자에 포장하고, 종이로 된 케이크 토퍼를 케이크에 꽂은 후 바닥에 있는 성냥을 안정적으로 파지하여 초에 불을 붙여 파티를 준비하거나, 바닥에 놓여있는 비정형 형상을 가진 다양한 꽃들의 가지를 파지하여 꽃꽂이를 하는 복합적인 작업 수행이 가능하다.

- 허리케인을 경험 할 수 있는 세계 최초 태풍 시뮬레이터 공개 VIDEO: World's first public STORM SIMULATOR that lets people experience a category II hurricane...
- 미래 먹거리 4족 보행 로봇...국방 건설뿐 아니라 산업 전 분야에 전도 유망(ft.고스트 로보틱스)
박찬훈 AI로봇연구본부장은 “집게·흡착 융합형 코끼리 코 그리퍼는 말랑말랑하여 사람과 함께 작업을 하는 과정에서도 부상의 위험이 없을 뿐 아니라, 복잡한 기계구조나 센서 없이도 정밀한 부품부터 박스까지 다양한 크기 물체를 쉽게 다룰 수 있어 일상생활은 물론 다양한 산업 분야에 적용이 가능하다”며 “다품종 변량생산 기업이나 일생 생활 속 서비스 로봇 개발에 큰 도움이 될 것으로 기대한다”고 말했다.
한편 이번 연구는 기계연 기본사업 ‘올인원 로봇 작업 시스템을 위한 스마트 엔드 이펙터’ 과제의 지원을 받아 수행됐다.
한국기계연구원
케이콘텐츠
