



로봇과 완벽하게 포옹하는 법 VIDEO: How to build a humanoid that gives perfect hugs




독일 막스플랑크 인텔리전스 연구소
HugieBot 3.0
The 11 Commandments of Hugging Robots
포옹 로봇의 11계명
우리가 지난 몇 년 동안 배운 것이 있다면, 신체적 접촉을 당연하게 여기지 않는 것이 얼마나 중요한가 하는 것이다. 불행하게도, 인간과의 신체 접촉은 로봇이 특히 어렵고 때로는 위험하다고 느끼는 것이기 때문에 우리는 로봇을 다른 사람과의 미묘한 신체 접촉의 대용품으로 안전하게 사용할 수 없다. 로봇이 강하고 인간이 질척거릴 뿐 아니라(두 가지 모두 사실이지만), 로봇들이 이해하지 못하는 인간과 인간의 상호작용에는 많은 복잡한 측면이 있다는 것이다.
"로봇의 포옹은 절대 같지 않다"

2018년에는 Alexis E의 연구에 대해 썼다. 독일 슈투트가르트에 있는 막스플랑크 인텔리전스 연구소의 햅틱 인텔리전스 부서의 블록과 캐서린 J. 쿠첸베커는 로봇에게 포옹을 잘 하도록 가르쳤다. 지난 몇 년 동안, 그들은 이 연구를 (공저자인 새미 크리스텐, 하스티 세이피, 오트마 힐리제, 로저 가세트와 함께) 계속했고, 새로운 포옹 로봇의 도입에 대한 개요를 설명하는 논문과 함께 로봇이 인간들이 인정하고 즐길 수 있는 포옹을 하기 위해 따를 수 있는 11개의 계명을 발표했다.
포옹하는 간단한 행동이 왜 그렇게 많은 연구 노력을 필요로 하는지 이해하기 위해, 다음에 여러분이 다른 사람을 포옹할 때 여러분이 무엇을 하고 있고 그들이 무엇을 하고 있는지 주의 깊게 관찰하면, 여러분은 이해하기 시작할 것이다.

포옹은 상호작용적이고, 감정적이고, 복잡하며, 좋은 포옹을 하는 것은 도전적이다. 많은 사회적 경험과 직관을 필요로 한다.이것은 어려운 로보틱스 문제라고 하는 또 다른 표현이다.사회적 경험과 직관은 로봇이 잘하지 못하는 경향이 있기 때문이다.
분명히 로봇 포옹은 인간의 포옹을 대신할 수 없다. 하지만 여기서의 생각은 때때로 인간의 신체적 편안함을 얻는 것이 어렵거나 불가능하다는 것이다. 그리고 이 경우, 로봇은 뭔가 유용한 것을 제공할 수 있을 것이다.
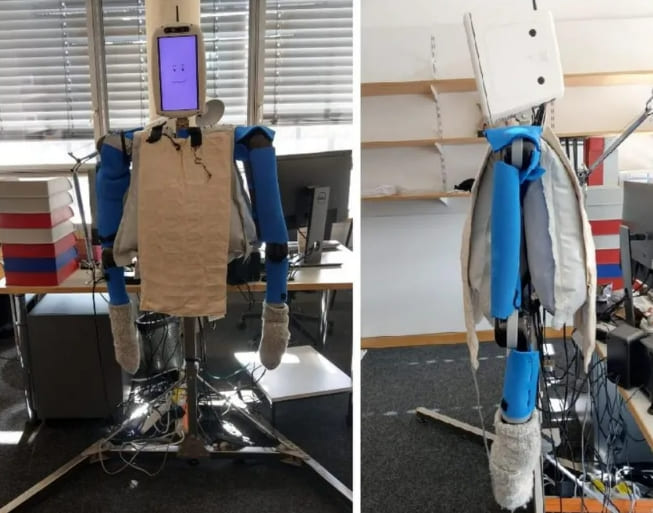
THRI(ACM Transactions on Human-Robot Interaction, 인간-로봇 상호 작용에 관한 ACM 트랜잭션)에서 막 받아들여진 본 논문에서 블록은 2021년 인간-로봇 상호 작용 컨퍼런스에서 발표된 연구를 바탕으로 로봇 포옹을 위한 계명을 개발하기 위해 데이터 중심 접근 방식을 사용했다. 일련의 하드웨어 반복과 사용자 연구를 통해 원래의 PR2 기반 로봇 포옹 플랫폼(HuggieBot)을 완전히 재구축하여 "사용자의 포옹 동작을 인식하고 반응하는 최초의 완전 자율형 인간 크기 포옹 로봇"인 HuggieBot 3.0으로 업그레이드했다.
HugieBot 3.0은 커스텀 메탈 프레임에 수평으로 장착된 6자유도 Kinova JACO 암 두 개를 중심으로 제작되었으며, 사람이 쉽게 접근할 수 있는 V자 형태의 수평 베이스 위에 있다. 팔은 패딩이 되어 있고 엔드 이펙터에는 벙어리 장갑이 붙어 있다. 프레임 위에는 부드러움뿐만 아니라 압력 감지 기능을 제공하는 공기 주입 챔버로 만들어진 가슴과 후면 패널이 배치되어 있으며, 각 공기 챔버 위에 가열 패드가 있어 로봇이 멋지고 따뜻함을 보장한다.

HugieBot 3.0이 따르는 11가지 계명은 다음과 같다.
포옹 로봇은 부드러워야 한다. 포옹 로봇은 따뜻해야 한다. 포옹 로봇은 성인 인간과 비슷한 크기로 제작되어야 한다. 포옹로봇이 상호작용을 시작한 경우, 개인 공간에서 누군가를 발견하면 자동으로 사용자를 포옹하도록 초대해야 한다. 포옹 로봇은 사용자가 자신을 향해 걷기 시작할 때까지 기다린 후 팔을 감고 동의하고 동시에 포옹하는 경험을 보장해야 합니다. 포옹 로봇은 일정한 포옹이 아닌 사용자의 신체 크기와 위치에 따라 포옹을 자율적으로 조정해야 한다. 포옹 로봇은 팔의 위치와 상관없이 포옹에서 벗어나고자 하는 사용자의 욕구를 확실하게 감지하여 대응하여야 한다. 좋은 포옹 로봇은 사용자의 키를 인지하고 적절한 신체 위치에서 사용자 주변에 편안하게 맞도록 팔 위치를 조정해야 한다. 포옹 로봇은 사용자의 손위치에 상관없이 몸통에 가해지는 제스처를 실시간으로 정확하게 감지하고 분류하는 것이 유리하다. 사용자들은 그들의 인트라허그 제스처에 빠르게 반응하는 로봇을 좋아한다. 너무 로봇적으로 보이지 않도록 하고 제스처 인식의 불가피한 오류를 감추기 위해 포옹 로봇은 포옹 제스처의 완벽한 상호 작용을 시도해서는 안 됩니다. 오히려 로봇은 사용자 선호도와 약간의 다양성 및 자발성을 혼합하는 제스처 응답 패러다임을 채택해야 한다. 로봇이 살아 있고 보살핌을 받고 있다는 사용자 느낌을 환기하기 위해 포옹 로봇은 때때로 사용자에게 유도되지 않은 사전 예방적인 감정적 소셜 터치를 제공해야 한다. |
황기철 콘페이퍼 에디터 인플루언서
Ki Chul Hwang Conpaper editor influencer
In the Arms of a Robot: Designing Autonomous Hugging Robots with Intra-Hug Gestures
