



네 발 달린 벽 오르는 '마그네코 로봇' VIDEO: Wall-climbing Magnecko robot is like a cross between a gecko and a spider




벽을 오르는 마그네코 로봇은 도마뱀과 거미의 교배종과 같다
하나의 발로 로봇의 총 무게의 2.5배까지 견딜 수 있어
높은 금속 구조물이나 기계를 검사하는 것은 사람들이 가까이에서 그리고 직접 수행하기 어려울 수 있고, 공중 드론이 도움이 될 수 있지만, 제한된 배터리 수명은 문제다. 그것이 자기 발을 가진 마그네코 로봇이 들어올 예정인 곳이다.

네 발 달린 Magneco 로봇은 수평면과 수직면을 걷는 것 사이에서 스스로 전환한다
스위스의 ETH Zurich 연구소의 8명의 공학 학사 학생 팀에 의해 만들어진 이 네발 달린 로봇은 이 도마뱀붙이의 벽과 천장을 오르는 능력에 의해 영감을 받았다. 그러나 이 도마뱀이 세태라고 불리는 작은 털과 같은 발 패드 구조를 사용하는 반면, Magneco는 ETH의 Robotic Systems Lab에서 개발된 특별한 전기 영구 자석 모듈을 사용한다.
각 모듈은 짧은 전기 펄스를 통해 순식간에 반복적으로 자화되고 탈자착될 수 있는 여러 개의 더 작은 자석으로 구성되어 있다. 중요한 것은, 자석이 두 상태를 유지하는 데 어떤 전기도 필요하지 않다는 것이다. 자석은 또한 자화될 때 매우 강력한다. 단 하나의 발로 로봇의 총 무게의 2.5배까지 견딜 수 있다.
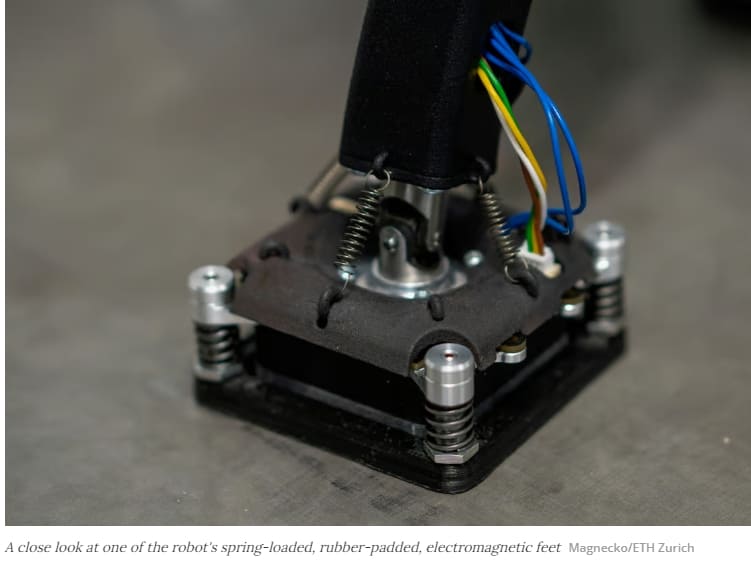
현재의 화신에서, 마그네코는 무선 핸드헬드 컨트롤러를 사용하여 조작자에 의해 어디로 가야 하는지 알려져야 한다. 즉, 로봇은 스스로 그 경로를 따라 진행하며, 수직 및 수평 강자성 표면을 걷는 것 사이에서 자율적으로 전환한다. 스프링이 장착된 고무 발 패드는 그렇게 할 때 견인력을 유지하도록 도와준다.
건강관리의 게임체인저가 될 삼성전자 최초의 웨어러블 로봇 Samsung Electronics’ first wearable robot set to be a gamechanger for healthcare
건강관리의 게임체인저가 될 삼성전자 최초의 웨어러블 로봇 Samsung Electronics’ first wearable robot se
웨어러블 봇 복근 사용 27% 증가 관절 유연성 39% 향상 한국의 거대 기술 회사인 삼성전자는 올해 말 건강관리 웨어러블 로봇 봇 핏을 공개하고 공식적으로 시장에 진출하여 채택을 개척할 것이다
conpaper.tistory.com
향후 계획에서는 로봇이 자율적인 장애물 회피 및 경로 계획을 수행할 수 있도록 요구하고 있으며 구조물을 확인하는 것 이상의 일을 수행할 수 있다.

"우리는 먼저 로봇이 점검 작업을 할 수 있도록 준비할 계획이지만, 미래에는 로봇이 자율적인 유지보수를 하거나 원격으로 작동되는 수리를 하는 것을 방해하는 것은 없습니다," 라고 팀원 니콜라스 파쉬가 우리에게 말했다. "이 로봇은 수 킬로그램의 짐을 지탱할 수 있고 곤충 스타일의 구성으로 필요에 따라 쉽게 위치를 정할 수 있습니다. 자석을 유지하기 위해 어떤 힘도 필요하지 않은 특수 자성 발 덕분에 로봇이 한 곳에 여러 시간 동안 매달려 작업을 수행할 수 있기 때문에 감시는 또한 매우 흥미로운 사용 사례입니다."
황기철 콘페이퍼 에디터 국토부 인플루언서
Ki Chul Hwang Conpaper editor influencer
Wall-climbing Magnecko robot is like a cross between a gecko and a spider
kcontents
