



개미 같이 군집 활동 가능한 4족 로봇 기술 개발 VIDEO:Cooperating Robot Swarms




노트르담대 야스민 오즈칸-에이딘
다리 달린 로봇
지상 환경에서 독특한 이동성 문제에 직면
로봇 공학자로서, 노틀담 대학의 전기 공학과 조교수인 야스민 오즈칸-에이딘은 생물학적 시스템에서 영감을 얻는다. 문제를 해결하고 장애물을 극복하기 위한 개미, 꿀벌, 새들의 집단 행동은 연구원들이 항공 및 수중 로봇공학에서 개발한 것이다. 그러나 복잡한 지형을 횡단할 수 있는 기능을 갖춘 소규모 군집 로봇을 개발하는 데는 고유한 과제가 따른다.
사이언스 로보틱스에 발표된 연구에서, 오즈칸-에이딘은 어떻게 그녀가 도전적인 환경에서 기동할 수 있고 자연 세계의 로봇들을 모방하여 어려운 일들을 집단적으로 해낼 수 있었는지에 대해 제시한다.
"다리로봇은 거친 지형과 좁은 공간과 같은 어려운 환경을 항해할 수 있고, 팔다리를 사용하는 것은 효과적인 신체 지지를 제공하고, 빠른 기동성을 가능하게 하며 장애물을 쉽게 건널 수 있게 해준다,"라고 오즈칸-에이딘은 말했다.

"하지만 다리가 달린 로봇은 지상 환경에서 독특한 이동성 문제에 직면해 있으며 이로 인해 보행 성능이 저하됩니다."
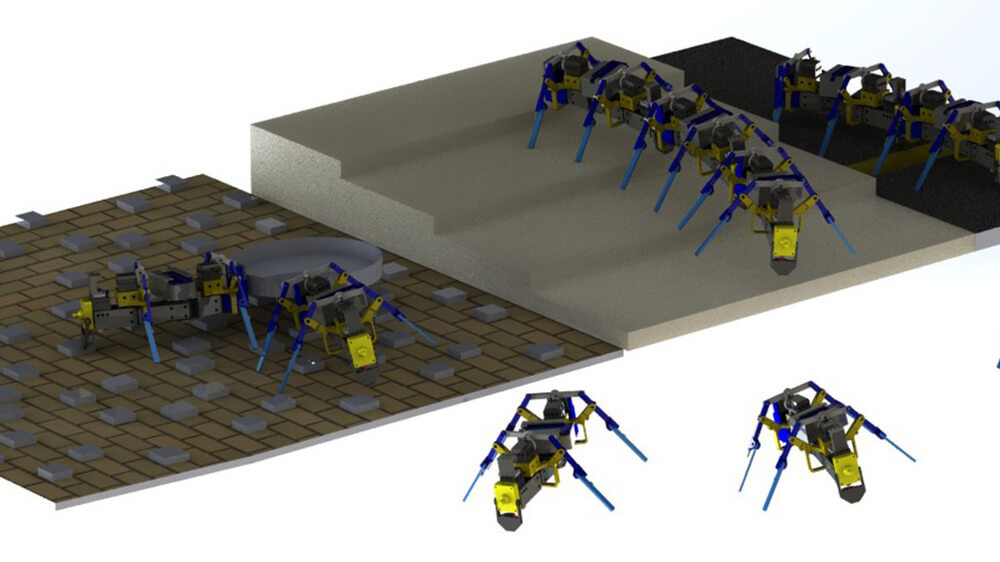
이 연구를 위해, 오즈칸-에이딘은 개별 로봇들 사이의 물리적 연결이 지상 다리 집단 시스템의 이동성을 향상시킬 수 있다고 가정했다고 말했다. 개별 로봇은 매끄러운 표면 위를 이동하거나 가벼운 물체를 운반하는 등 단순하거나 작은 작업을 수행했지만 단일 유닛의 능력을 벗어난 경우 물리적으로 서로 연결하여 더 큰 다족 시스템을 형성하고 집단적으로 문제를 극복했다.
"개미들이 물건을 모으거나 운반할 때, 장애물에 부딪히면, 그 장애물을 극복하기 위해 집단으로 일한다. 예를 들어, 그 길에 틈이 있다면, 다른 개미들이 이동할 수 있도록 다리를 형성할 것이다 – 그리고 그것이 이 연구를 위한 영감이다," 라고 그녀가 말했다. "로봇을 통해 우리는 이러한 생물학적 시스템의 역동성과 집단 행동을 더 잘 이해할 수 있고 미래에 어떻게 이런 종류의 기술을 사용할 수 있을지 탐구할 수 있다."
VIDEO
3D 프린터를 사용하여, Ozkan-Aydin은 길이가 15에서 20 센티미터 또는 약 6에서 8 인치인 4개의 다리를 가진 로봇을 만들었다. 각각은 리튬 폴리머 배터리와 마이크로컨트롤러, 그리고 3개의 센서를 갖추고 있었다. 앞과 뒤에 광센서와 두 개의 마그네틱 터치 센서로 로봇들이 서로 연결할 수 있게 했다. 4개의 유연한 다리는 추가적인 센서와 부품의 필요성을 줄였고 로봇들에게 거칠거나 울퉁불퉁한 지형과 상호작용할 때 도움이 되는 기계적인 지능 수준을 주었다.
"여러분은 장애물을 감지하기 위해 추가적인 센서가 필요하지 않는다. 왜냐하면 다리의 유연성이 로봇이 장애물을 바로 지나치도록 도와주기 때문이다," 라고 오즈칸-에이딘이 말했다. "그들은 길의 틈새를 테스트하고, 몸으로 다리를 만들고, 물체를 개별적으로 움직이거나, 개미와 다르지 않은 다른 유형의 환경에서 물체를 집합적으로 이동시키기 위해 연결할 수 있다."
황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
(Source:
https://news.nd.edu/news/researchers-successfully-build-four-legged-swarm-robots/)
Cooperating Robot Swarms
kcontents
