



다기능 건설로봇 바우봇 VIDEO:Austrian startup Printstones reveals multifunctional construction Baubot




Austrian startup Printstones reveals multifunctional construction Baubot
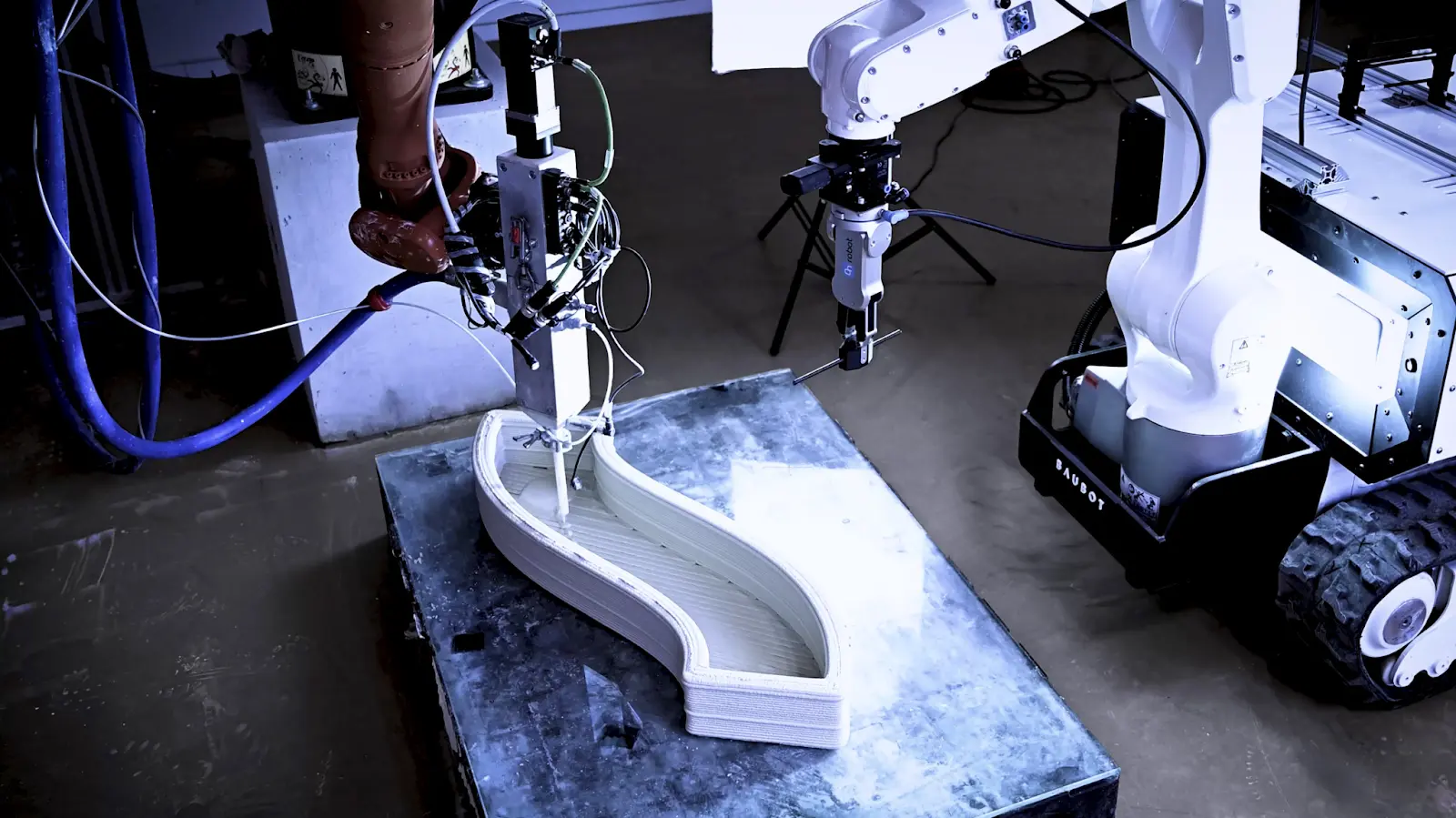
The Austrian startup Printstones has been developing mobile robotic systems for 3D printing since 2017. After completing more than 100 pilot projects the young firm has now revealed a new prototype: Baubot. This new robot has a modular design approach and is open to external inputs for innovation. The stated goal of the tech company is to bring any tool into any location and utilize it there. This means that 3rd parties can develop and add their tools and applications to the mobile robot. Developers can use an SDK as an interface to the robot’s functionality.

The promotional video shows a variety of possible applications, including handling and transportation of building material, observation, screw driving, plasma cutting and drilling.

The robot can climb stairs, drive through doors and is powered by electric energy. The vehicle has a maximum speed of 3.2 km/h with a possible payload of 500 kg. The positioning of the robotic arm has an accuracy of below 1 mm. Currently, the operation time can be up to 8 hours depending on the application. The mobile robot can be used in manual or preprogrammed mode, in which case the robot’s workday can be simulated upfront. Baubot can use standard transporter and needs almost no set-up time.
https://www.3dprintingmedia.network/austrian-startup-printstones-reveals-multifunctional-construction-baubot/
오스트리아의 스타트업 프린트스톤이 선보인 건설 로봇 바우봇
오스트리아의 스타트업인 Printstones는 2017년부터 3D 프린팅을 위한 모바일 로봇 시스템을 개발해왔다. 100개 이상의 파일럿 프로젝트를 완료한 후 이 젊은 회사는 새로운 프로토타입을 공개했다.
바로 바우봇이다.
이 새로운 로봇은 모듈식 설계 접근법을 가지고 있으며 혁신을 위한 외부 입력에 개방적이다. 기술 회사의 명시된 목표는 모든 도구를 어느 위치에든 가져와 그곳에서 활용할 수 있다. 이는 제3자가 자신의 도구와 애플리케이션을 개발하고 모바일 로봇에 추가할 수 있다는 것을 의미한다. 개발자는 로봇의 기능에 대한 인터페이스로 SDK를 사용할 수 있다.

홍보 영상은 건축 자재의 취급 및 운반, 관찰, 스크루 주행, 플라즈마 절단 및 드릴링 등 다양한 응용 가능성을 보여준다.
로봇은 계단을 오를 수 있고, 문을 통해 운전할 수 있으며, 전기에너지로 작동된다. 차량은 최대 속도가 3.2 km/h이고 가능한 적재량은 500 kg이다. 로봇 암의 위치는 정확도가 1mm 미만이다. 현재, 작동 시간은 애플리케이션에 따라 최대 8시간까지 가능하다. 모바일 로봇은 수동 또는 사전 프로그래밍 모드에서 사용할 수 있으며, 이 경우 로봇의 작업일을 미리 시뮬레이션할 수도 있다. 바우봇은 표준 트랜스포터를 사용할 수 있고 설정 시간이 거의 필요하지 않다.
황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
edited by kcontents
Baubot
kcontents
