



세계 최대 로봇 컨퍼런스...최고의 로봇들...세계 로봇 행사 일정 VIDEO: Autonomous Car Drifting, Aerial-Aquatic Drone, and Jet-Powered Robot




자율주행 자동차 표류, 공중-수중 드론, 제트 동력 로봇
세계 최대 로봇 컨퍼런스의 최고 로봇 비디오

로봇 행사 일정
ENERGY DRONE & ROBOTICS SUMMIT: 10–12 JUNE 2023, HOUSTON, TEXAS, USA
ROBOCUP 2023: 4–10 JULY 2023, BORDEAUX, FRANCE
RSS 2023: 10–14 JULY 2023, DAEGU, SOUTH KOREA
IEEE RO-MAN 2023: 28–31 AUGUST 2023, BUSAN, SOUTH KOREA
IROS 2023: 1–5 OCTOBER 2023, DETROIT, MICHIGAN, USA
CLAWAR 2023: 2–4 OCTOBER 2023, FLORIANOPOLIS, BRAZIL
HUMANOIDS 2023: 12–14 DECEMBER 2023, AUSTIN, TEXAS, USA
프랭크 주모, 조나단 Y.M. 고, Ufuk Topcu, Avinash Balachandran(텍사스 오스틴 대학),
도요타 연구소(캘리포니아 로스알토스)의 "학습된 타이어 모델을 통한 3분간의 데이터 자율"

접착력의 한계 근처에서 타이어에 의해 생성되는 힘은 비선형적이고 복잡하게 결합됩니다. 이 지역에서 효율적이고 정확한 모델링은 특히 높은 힘이 필요한 비상 상황에서 안전을 향상시킬 수 있습니다.
이를 위해, 우리는 신경 정상 미분 방정식과 신경-ExpTanh 매개 변수화를 기반으로 하는 새로운 타이어 힘 모델 제품군을 제안합니다. 이러한 모델은 물리적으로 통찰력 있는 가정을 충족하는 동시에 차량 상태 측정에서 직접 고차 효과를 포착할 수 있는 충분한 충실도를 갖도록 설계되었습니다. 기존 비선형 모델 예측 제어 프레임워크에서 분석 브러시 타이어 모델의 드롭인 대체물로 사용됩니다. 맞춤형 Toyota Supra를 사용한 실험 결과, 3분 미만의 적은 양의 주행 데이터만으로도 최대 시속 45마일의 속도로 다양한 궤도에서 고성능 자율 드리프트를 달성하기에 충분하다는 것을 알 수 있었습니다. 벤치마크 모델과 비교하면 추적 성능이 4배 향상되고, 제어 입력이 원활하며, 더 빠르고 일관된 계산 시간이 제공됩니다.
"TJ-Flying Fish: 기울어질 수 있는 추진 장치를 갖춘 공중-수중 쿼드로터의 설계 및 구현",
Xucheen Liu, Minghao Dou, Dongween, Songqun Gao, Ruixin Yan, Biao Wang, Jinqang Cui, Qinyuan, Liua Dou, Zi Gao, Chen, Men, Ben, Ben의 작품. 중국 상하이 통지대학교 지능형 자율 시스템 연구소의 Chen, 홍콩 중문대학교, 중국 장쑤성 난징 항공 우주 대학, 중국 선전의 Peng Cheng 연구소, 광둥성의 Zhangju, Zhangju, Zhangi University의 Chen, 중국, 중국의 베이징 공과대학, 중국 후베이성 우한시의 우한 대학.

공중 수상 차량은 가장 지배적인 두 가지 유체에서 이동할 수 있으므로 광범위한 응용 분야에서 더 유망합니다. 우리는 물과 공기의 유체 특성의 큰 차이에 대처하기 위해 추진 및 추진기 구성을 위한 특별한 설계를 가진 프로토타입을 제안합니다.
세계 최초 나무 트랜지스터...살아있는 식물에 이식 가능 VIDEO: The World’s First Wooden Transistor
https://conpaper.tistory.com/108954
추진을 위해, 작동 범위는 2단 추진 장치에 의해 다양한 매체로 전환되어 충분한 추력을 제공하고 출력 효율을 보장합니다. 추진기 구성의 경우, 추진 장치가 마운트 암 주위에서 회전함으로써 추력 벡터링이 실현되어 수중 기동성이 향상됩니다. 이 논문은 이 개념의 쿼드로터 프로토타입과 설계 세부사항 및 실제 구현을 제시합니다.
홍콩 중문대학교와 홍콩 멀티스케일 메디컬 로보틱스 센터의 탕윈시, 안 지아준, 추샹위, 왕성지, 왕칭옌, 오사무엘이 쓴 "3도 F 변형 관성 꼬리를 사용하여 추락하는 네발 로봇의 안전한 착륙을 향하여".
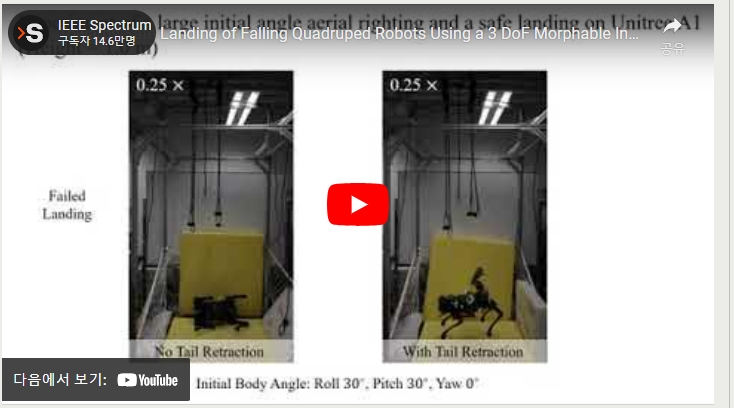
추락하는 고양이 문제는 고양이가 초공중 방향 전환 능력을 보여주고 안전하게 착륙할 수 있는 것으로 잘 알려져 있습니다. 로봇 상대의 경우 고양이만큼 안전한 착륙을 달성하는 것이 점점 더 연구되고 있음에도 불구하고 유사한 추락하는 네발 로봇 문제가 완전히 해결되지 않았습니다. 착륙 제어에 부담을 주는 것과 달리, 효과적인 비행 단계 제어를 통해 추락하는 네발 로봇의 안전한 착륙에 접근합니다. 다리를 흔들고 반응 바퀴나 간단한 꼬리를 부착하는 것과 같은 기존 작업과는 달리 중형 네발 로봇에 3DoF 형태의 관성 꼬리를 배치할 것을 제안합니다. 비행 단계에서 최대 길이의 꼬리는 3D로 신체 방향을 효과적으로 오른쪽으로 이동할 수 있습니다. 터치다운하기 전에 꼬리 길이를 최대 길이의 약 1/4로 접어서 착륙 시 꼬리의 부작용에 영향을 줄 수 있습니다.
4족 보행 로봇에서 안전한 착륙을 위한 항공 방향 변경을 가능하게 하기 위해 서로 다른 초기 조건을 가진 충실도가 높은 물리 시뮬레이션 환경에서 검증된 제어 아키텍처를 설계합니다. 유사한 관성 특성을 가진 맞춤형 비행 단계 테스트 플랫폼에 대한 실험 결과가 제공되고 3D 차체 방향 변경에 대한 테일의 효과와 터치다운 전 빠른 접힘성을 보여줍니다. 3-DoF 꼬리를 가진 로봇 Unitree A1이 무시할 수 없는 초기 신체 각도에 따라 안전하게 착륙할 수 있는 초기 낙하 4족 로봇 실험이 표시됩니다.
노엘 초메이-샹클린, 빅터 D의 "3D 호핑 로봇의 비선형 모델 예측 제어: 동적으로 안정적인 행동을 위한 거짓말 그룹 통합자 활용" 도로반투, 그리고 아론 D. 캘리포니아 패서디나의 칼텍에서 온 에임스입니다.
안정적인 호핑을 달성하는 것은 동적 다리 이동 분야에서 특징적인 도전이었습니다. 제어된 호핑은 글로벌 상태를 조절하기 위해 지면 상호 작용을 조절해야 하는 매우 짧은 지면 위상과 결합된 장시간의 과소 작동으로 인해 특히 어렵습니다. 본 연구에서는 새로운 3D 호핑 로봇에서 동적으로 안정적인 움직임을 달성하기 위해 다중 속도 계층에서 저수준 피드백 컨트롤러와 쌍을 이루는 하이브리드 비선형 모델 예측 제어의 사용을 탐구합니다. 회전의 다양성에서 보다 풍부한 행동을 보여주기 위해, 계획 및 피드백 레이어는 모두 기하학적으로 일관된 방식으로 설계되어야 합니다. 따라서, 우리는 Lie 그룹 통합자와 적절한 피드백 컨트롤러를 사용하는 데 필요한 도구를 개발합니다. 우리는 새로운 로봇에서 안정적인 3D 호핑을 실험적으로 시연하고, 시뮬레이션에서 궤적 추적 및 플립을 보여줍니다.
진동하는 해파리 로봇, 인공 근육 사용 '해양쓰레기' 진공 청소 VIDEO: Pulsating jellyfish robots can pick up and vacuum ocean trash using artificial muscles
https://conpaper.tistory.com/108907
진동하는 해파리 로봇, 인공 근육 사용 '해양쓰레기' 진공 청소 VIDEO: Pulsating jellyfish robots can pick u
해파리 로봇으로 바다 청소하기 막스 플랑크 지능 시스템 연구소 언젠가 바다를 쓰레기로부터 자유롭게 만드는 것은 슈투트가르트에 있는 막스 플랑크 지능 시스템 연구소의 로봇 공학자들이
conpaper.tistory.com
뉴욕 컬럼비아 대학의 Zechen Xiong, Yufeng Su, Hod Lipson의 "탄력적인 불안정성을 가진 빠르게 연결되지 않은 소프트 로봇 크롤러".
치타와 늑대와 같은 포유류의 빠른 걸음걸이에 착안하여, 우리는 mm/s와 BL/s로 보고된 대부분의 소프트 크롤러보다 빠른 초당 313밀리미터 또는 1.56 신체 길이(BL/s)의 속도로 질주할 수 있는 단일 작동 미준수 로봇을 설계하고 제작합니다. 반강성 물질로 구성된 평면 내 사전 응력 헤어 클립 메커니즘(HCM), 즉 플라스틱이 로봇의 지지 섀시, 준수 척추 및 힘 증폭기로 동시에 사용되어 로봇이 단순하고 신속하며 강력할 수 있습니다. 실험을 통해, 우리는 HCM 로봇 이동 속도가 콘크리트 표면을 제외하고 작동 주파수 및 기판 마찰 차이와 선형적으로 관련되어 있고, 테더링이 크롤러를 느리게 하고, 비대칭 작동이 새로운 질주 걸음걸이를 만든다는 것을 발견했습니다. 이 논문은 HCM 기반 소프트 로봇의 잠재력을 보여줍니다.
태국 비디야시리메디 과학기술연구소(VISTEC)와 덴마크 남부 몰리니 대학의 Thirawat Chuthong, Wassuthorn Ausrivong, Binggwong, Jetanan Homchanthanakul, Nopparada Mingchinda, Poramate Manoonpong의 "동물에서 로봇까지 자연에서 영감을 받은 기계 지능"
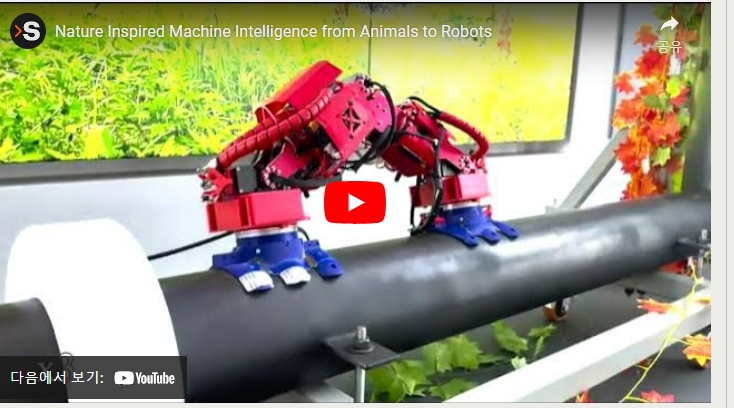
자연에서, 살아있는 생물들은 다재다능한 행동을 보입니다. 그들은 다양한 지형에서 움직일 수 있고 다리를 사용하여 인상적인 물체 조작/운반을 수행할 수 있습니다. 그들의 형태학과 제어 전략에서 영감을 받아, 우리는 생물학에서 영감을 받은 로봇과 적응형 모듈 신경 제어를 개발했습니다. 이 비디오에서, 우리는 로봇 동물원 설정에서 생물학적 영감을 받은 다섯 개의 로봇을 보여줍니다. 두 개의 전자기 발(Freelander-02 및 AVIS)이 있는 인치웜에서 영감을 받은 로봇은 적응적으로 기어다니며 수평 및 수직 금속 파이프에서 균형을 맞출 수 있습니다.
특수 설계를 통해 Freelander-02 로봇은 장애물 아래로 기어 들어가도록 자세를 조정할 수 있고 AVIS 로봇은 플랜지를 넘을 수 있습니다. 다중 차체 세그먼트(Freelander-08)를 가진 밀리피드에서 영감을 받은 로봇은 차체 관절을 능동적으로 조정하여 범프 지형에서 효율적으로 탐색할 수 있습니다. 쇠똥구리에서 영감을 받은 로봇(ALPHA)은 뒷다리로 물체를 잡고 동시에 쇠똥구리처럼 남은 다리로 뒤로 걸을 수 있습니다. 마지막으로, 육각형 로봇 플랫폼인 곤충에서 영감을 받은 로봇(MORF)은 전형적인 곤충과 같은 기트(느린 파도와 빠른 삼각대 기트)를 보여줍니다. 간단히 말해서, 우리는 이 생물학적 영감을 받은 로봇 동물원이 생물체의 다양하고 매혹적인 능력이 다양한 로봇 기능을 달성하고 많은 자유도를 가진 시스템에서 복잡한 모터 제어 문제를 해결할 수 있는 로봇 기술을 개발하는 데 영감과 원리 역할을 할 수 있다는 것을 보여준다고 생각합니다.
kcontents
