



"움직이는 가상 물질을 입체적으로 쥘 수 있는 가상현실 컨트롤러 개발" 카이스트




회전하는 원판 활용 6-자유도 햅틱 컨트롤러
산업디자인학과 안드리아 비앙키(Andrea Bianchi) 교수 연구팀
카이스트 산업디자인학과 안드리아 비앙키(Andrea Bianchi) 교수 연구팀이 회전하는 원판을 활용한 6-자유도 햅틱 컨트롤러를 개발했다고 12일 밝혔다.
비앙키 교수 연구팀은 마이크로소프트(Microsoft Research)와 협업해 움직이는 물체의 이동 속도, 방향과 두께감을 표현하는 `SpinOchhio(스피노키오)' 컨트롤러를 개발했다. 이 컨트롤러는 한 쌍의 회전 원판과 피버팅(2차적 축 회전) 메커니즘을 활용해 가상 환경(VR Environment)에서 사용자가 엄지와 검지로 쥐고 있는 물체가 손가락 사이를 지나가는 속도, 방향과 두께의 감촉을 사실적으로 체험할 수 있게 한다.

산업디자인학과 김명진 박사과정이 제1 저자로 참여한 이번 연구는 지난 5월 4일에 `ACM CHI 2022 (2022 CHI Conference on Human Factors in Computing Systems)' 국제학회에서 발표됐다. (논문명: SpinOcchio: Understanding Haptic-Visual Congruency of Skin-Slip in VR with a Dynamic Grip Controller)
기존의 가상현실(VR) 컨트롤러는 가상 물체와의 상호작용을 표현하는 방법으로 진동 피드백만을 활용해, 손에 쥔 물체의 움직이는 속도, 방향, 또는 두께감에 대한 촉감 피드백을 표현하는 데에 한계가 있었다.


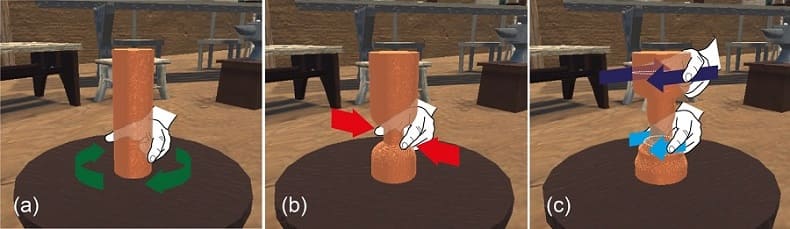
손가락으로 쥐고 있는 가상 물체의 움직임과 다양한 두께감을 사실적으로 재현하기 위해서는 각 손가락에 닿는 표면의 움직임과 표면 간의 거리를 고려해야 한다. 연구팀이 개발한 `스피노키오'는 한 쌍의 피버팅 하는 회전 원판을 엄지와 검지 각 손가락 끝에 접촉하게 함으로써, 손가락 사이에 있는 물체가 다양한 방향으로 미끄러지거나 회전하는 감각을 재현한다.
또한 연구팀은 두 원판 간의 거리를 조절함으로 가상 환경에서 실시간으로 다양한 물체의 두께와 형태의 촉감을 구현했다. 엄지와 검지 각 손가락 끝에 접촉한 표면의 움직이는 방향(1), 속도(2)와 폭(3)을 개별적으로 제어하여 `스피노키오'는 총 6-자유도 햅틱 피드백을 구현한다.
연구팀은 `스피노키오'를 활용해 표면의 움직임의 방향 변화에 대한 사용자들의 인지능력을 측정했고, 가상 물체를 재현했을 때 가상현실의 시각적 피드백이 촉각 피드백 인지에 큰 영향을 끼치는 것을 실험적으로 확인했다.
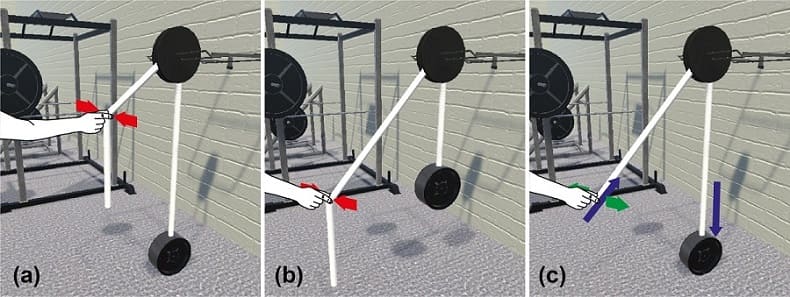
`스피노키오'의 활용 예시로 연구팀은 가상 환경에서 사용자가 손가락으로 힘을 주어 물체를 집어 올리거나 잡아당기거나 꼬집어 변형시키는 상호작용과 더불어 힘을 빼고 물체를 쓰다듬거나 떨어뜨리는 등 다양한 물체와의 상호작용을 제안했다.
연구를 주도한 안드리아 비앙키 교수는 "이번에 개발한 스피노키오는 이전과 달리 사용자가 움직이는 가상의 물체를 입체적으로 손으로 쥐는 햅틱 경험을 구현한 특징이 있으며, 3D 모델링 작업과 가상 교육 환경 등에 특히 응용되어 산업적 가치를 지닌다ˮ라고 설명했다.
한편 이번 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행됐다.
카이스트 홍보실
- 윤석열 정부 1기 내각 인선 현황...차관⋯
- DL건설, 대전 대둔산로 494번길(유천동)⋯
- 한국도로공사-KIND, 민간 해외수주 지원⋯
- 매너리즘에 빠진 올드 미디어...눈에 안⋯
- 이런게 진짜 공약...보고 배우세요!...⋯
케이콘텐츠
