



MIT의 보다 쉬운 로봇 학습 방법 An easier way to teach robots new skills




이전에 본 적 없는 물체도 가능
전자상거래 주문이 쏟아지자 창고 로봇이 선반에서 머그잔을 꺼내 상자에 담아 배송한다. 이제 로봇이 거꾸로 저장된 더 크고 더 좁은 머그잔을 잡아야 할 때까지 모든 것이 윙윙거리고 있다.
이 로봇을 재프로그래밍하는 것은 이 새로운 머그잔을 잡는 방법을 보여주는 수천 개의 이미지에 손으로 라벨을 붙이는 것을 포함한다. 그리고 나서 시스템을 다시 훈련시킨다.

그러나 MIT 연구진에 의해 개발된 새로운 기술은 이 로봇을 재프로그래밍하기 위해 소수의 사람 시연만 필요로 한다. 이 기계 학습 방법은 로봇이 본 적이 없는 무작위 포즈로 이전에 본 적이 없는 물체를 집어서 배치할 수 있게 한다. 10분에서 15분 이내에 로봇은 새로운 선택 및 배치 작업을 수행할 준비가 된다.
이 기술은 3D 물체의 모양을 재구성하기 위해 특별히 설계된 신경망을 사용한다. 몇 번의 시연으로 시스템은 신경망이 3D 기하학에 대해 학습한 내용을 사용하여 데모에 있는 것과 유사한 새로운 객체를 파악한다.
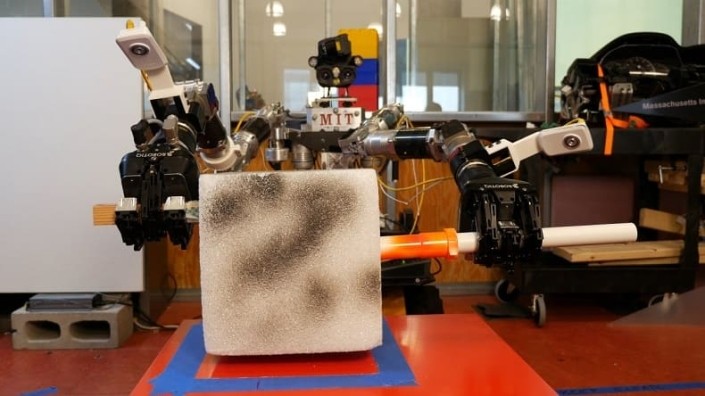
시뮬레이션과 실제 로봇 팔을 사용하여, 연구원들은 그들의 시스템이 로봇을 가르치기 위해 단지 10개의 시범을 사용하여, 전에 본 적이 없는 머그컵, 그릇, 그리고 병을 무작위 포즈로 배열한 것을 효과적으로 조작할 수 있다는 것을 보여준다.
"우리의 주요 기여는 변동성이 큰 구조화되지 않은 환경에서 작동해야 하는 로봇에게 새로운 기술을 훨씬 더 효율적으로 제공할 수 있는 일반적인 능력입이다. 건설에 의한 일반화의 개념은 이 문제가 일반적으로 훨씬 더 어렵기 때문에 매력적인 능력이다," 라고 이 논문의 공동 저자이자 전기 공학 및 컴퓨터 과학 대학원생인 Anthony Simeonov가 말한다.
시메오노프는 EECS 대학원생인 이룬 두, 구글 브레인의 연구원 안드레아 타글리아사치, 조슈아 B와 함께 논문을 썼다. 테넨바움, 폴 E. 뉴턴 커리어 개발 교수(뇌 및 인지과학부 인지과학 및 계산학 교수)와 컴퓨터 과학 및 인공지능 연구소(CSAIL) 회원, 1957년 기계공학부 부교수 알베르토 로드리게스(Alberto Rodriguez), 그리고 수석 저자인 풀키트 아그라왈(Pulkit Agrawal)이 박사이다.CSAIL 교수, EECS의 신임 조교수 빈센트 시츠만(Vincent Sitzmann. 이 연구는 로보틱스 및 자동화에 관한 국제회의에서 발표될 것이다.
파지 기하학
로봇은 특정한 물건을 집도록 훈련될 수 있지만, 만약 그 물체가 옆으로 누워 있다면, 로봇은 이것을 완전히 새로운 시나리오로 본다. 이것은 기계 학습 시스템이 새로운 객체 방향으로 일반화하는 것이 어려운 한 가지 이유이다.
이 과제를 극복하기 위해 연구원들은 항목 클래스의 3D 기하학을 학습하는 새로운 유형의 신경망 모델인 신경 기술자 필드(NDF)를 만들었다. 이 모델은 3차원의 데이터 점 또는 좌표 집합인 3D 포인트 클라우드를 사용하여 특정 항목에 대한 기하학적 표현을 계산한다. 데이터 포인트는 물체와 시점 사이의 거리에 대한 정보를 제공하는 깊이 카메라에서 얻을 수 있다. 네트워크는 합성 3D 모양의 대규모 데이터 세트에 대한 시뮬레이션으로 훈련되었지만 실제 세계의 개체에 직접 적용할 수 있다.
황기철 콘페이퍼 에디터 인플루언서
Ki Chul Hwang Conpaper editor influencer
(Source:
https://news.mit.edu/2022/teach-pick-robots-new-task-0425)
- 조성진, 라흐마니노프 피아노 협주곡 2⋯
- 저소득 청년에 1년간 매달 월세 최대 20⋯
- "자율주행 상용화 본격화,한국의 제도⋯
- 안전보건공단, 위험요인 개선 보조금 신⋯
- 전국 11개 항만 58개 항만사업장에 재⋯
kcontents
