



다양한 형상 물체 파지 가능한 문어 모양 흡착형 만능 그리퍼 개발 [한국기계연구원]




비대면 서비스 로봇을 위한, 문어 다리 닮은 흡착형 만능 그리퍼 개발
하나의 단순한 흡착 그리퍼로 다양한 형상 물체 파지 가능
아침준비, 서예에 백신접종까지 로봇으로 일상생활 속의 복잡한 작업들 구현
과학기술정보통신부 산하 한국기계연구원(원장 박상진, 이하 기계연)이 문어 다리를 닮은 흡착형 만능 로봇 그리퍼를 개발했다.
산업 현장에 널리 쓰이고 있는 진공 흡착 그리퍼 기술을 한 단계 끌어올린 새로운 흡착 그리퍼 기술로, 단순한 흡착 그리퍼 하나만으로도 아침 준비, 서예, 망치질, 백신 접종까지 일상생활 속의 복잡한 작업이 가능해 비대면 서비스를 구현하기 위한 핵심 로봇 기술이 될 것으로 기대된다.
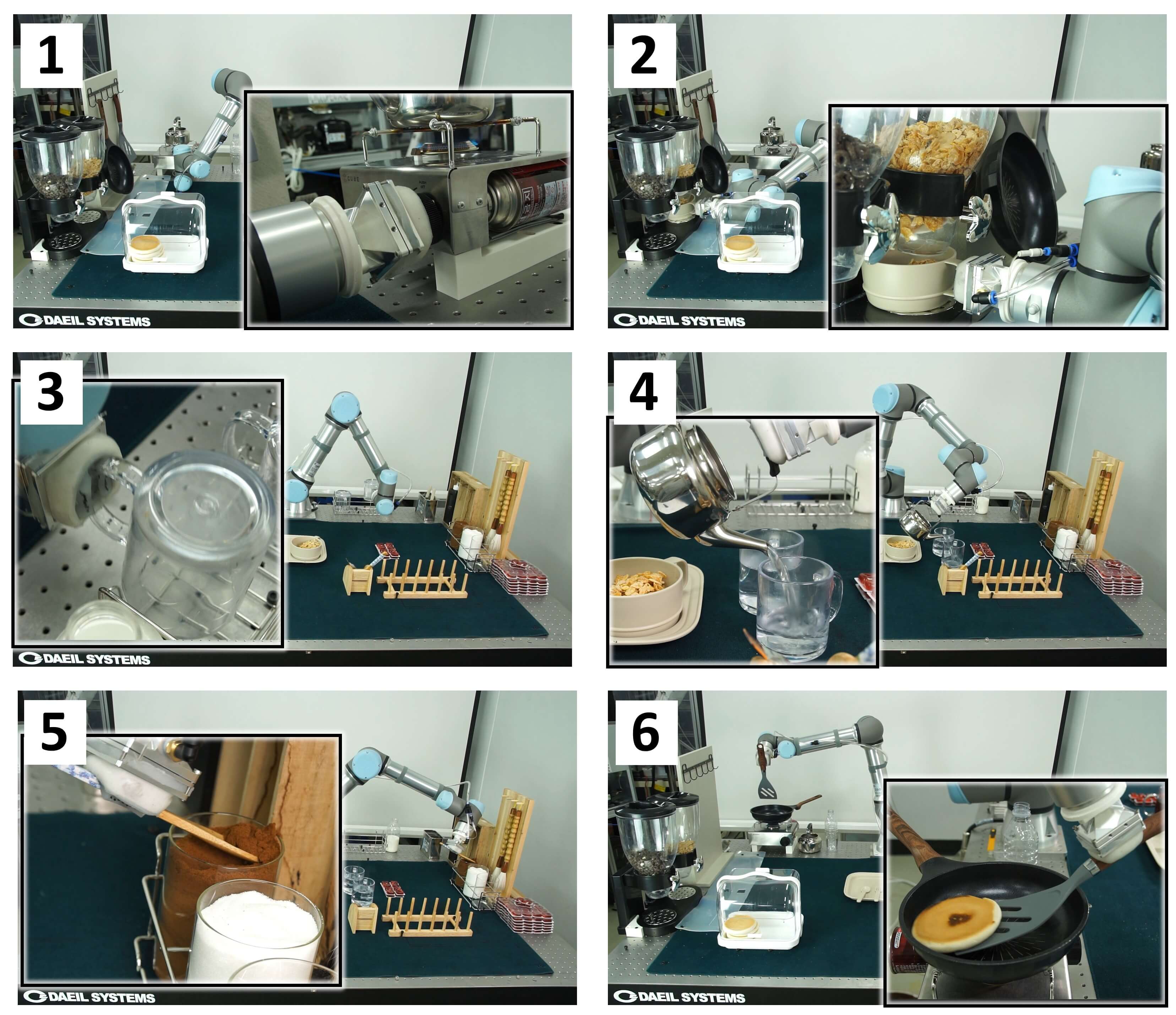
가스렌지 손잡이 돌려 불 켜기, 시리얼 컵을 파지한 후 시리얼 디스펜서 돌려 시리얼 받기, 좁은 손잡이의 컵을 파지하여 옮긴 후 무거운 주전자 손잡이를 잡아서 뜨거운 물 붓기,
뒤집개로 호떡 굽기 등의 작업을 하나의 그리퍼로 구현할 수 있었다.
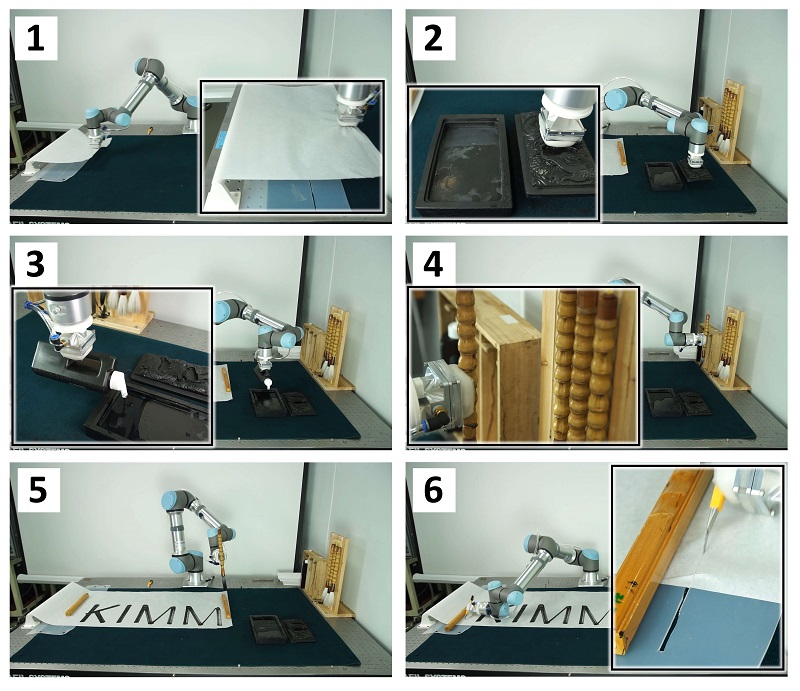
한국기계연구원 로봇메카트로닉스연구실이 흡입형 만능 그리퍼를 이용해 서예에 필요한 다양한 작업들을 구현하고 있다.
무겁고 복잡한 형상의 벼루 뚜껑을 파지하여 열기, 손잡이 면적이 좁아 파지하기 힘든 먹물 통을 파지하여 먹물 붓기,
형상이 복잡한 붓을 잡아서 흔들리지 않고 글씨 쓰기, 그리고 커터칼을 안정적으로 잡아서 종이 절단까지 하나의 그리퍼로 구현하였다.
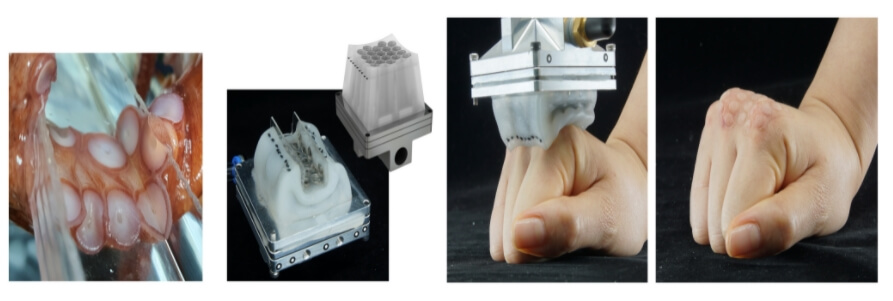
만능 흡착 그리퍼가 형상이 실제 사람 손을 파지한 상태와(사진3) 그리퍼를 때어낸 직후 자국(사진4).
손의 복잡한 굴곡에도 불구하고 모든 면에 대해 안정적인 흡착을 구현하고, 따라서 문어 빨판에 붙었을 때처럼 흡입구 구멍 하나하나가 선명하게 나타나 있다.
기계연 첨단생산장비연구부 로봇메카트로닉스연구실 송성혁 선임연구원 연구팀은 기존의 진공 흡착 그리퍼가 파지하기 힘든 복잡한 형상의 물건까지 안정적으로 파지할 수 있는 흡착형 만능 그리퍼를 개발했다.
이번에 개발한 그리퍼는 다양한 사물을 파지한 다음 위치를 단단하게 고정할 수 있어 파지한 사물로 일상생활 속 다양한 작업을 할 수 있다.
흡착형 만능 그리퍼는 문어가 다리와 빨판을 동시에 이용하여 다양한 사물을 잘 잡는 것에서 착안하여 개발됐다. 문어가 물체를 잡기 위해 가장 먼저 다리로 물체를 휘감듯이, 그리퍼가 물체에 닿을 때 물체를 감싸 안도록 설계됐다.
연구팀은 이를 구현하기 위해 유연한 그리퍼 표면에 미세 와이어 구조를 나란히 배치하여 물체가 미세 와이어를 누르기 시작하면 그리퍼 구조가 물체 방향으로 오므라들게 했다.
또한, 문어의 빨판이 물체의 세부적인 형상대로 바뀌어 안정적으로 흡착하듯, 물체를 감싸 안은 상태에서 그리퍼 표면의 유연한 구멍이 물체의 세부 형상에 따라 변화해 밀착한 후 강하게 흡착하도록 했다.
유연한 구멍은 벌집 형상의 부드러운 구조로 이뤄져 표면이 심하게 굴곡진 물체도 그에 맞춰 효과적으로 밀착할 수 있다.
이번에 개발한 흡착 만능 그리퍼의 외곽 구조는 실시간으로 단단하거나 말랑하게 바꿀 수 있는데 이는 문어가 다리를 단단하거나 말랑하게 바꾸는 것에서 착안했다.
송성혁 선임연구원은 “사물을 파지한 후 그리퍼의 외곽 구조가 딱딱하게 굳어지면서 물체의 위치가 고정되기 때문에 파지한 사물로 다양한 일상 작업이 가능하다”고 설명했다.
연구팀은 이 흡착형 만능 그리퍼를 이용해 일상생활 속 사물을 단순히 파지하는 것에 그치지 않고 다양한 비대면 서비스까지 가능한 것을 확인했다.
아침 식사를 준비하는 과정에서 뒤집개를 잡아 호떡을 뒤집으면서 굽거나, 서예를 위한 벼루, 먹물, 화선지, 붓과 같은 사물을 다루며 붓글씨를 쓰는 동작도 가능하다. 백신 접종 시 필요한 백신 바이알이나 주사를 다루는 등 다양한 동작에도 성공했다.
박찬훈 로봇메카트로닉스연구실장은 “개발된 흡착형 만능 그리퍼는 모터나 복잡한 기구 메커니즘 없이 단순한 흡착만으로 복잡한 작업까지 수행할 수 있는 세계 최초 기술”이라며 “향후 다양한 상황에서 다양한 사물을 효과적으로 다루어야 하는 비대면 서비스 로봇 개발에 큰 역할을 할 것으로 기대한다”고 말했다.
한편 이번 연구는 기계연 기본사업 ‘올인원 로봇 작업 시스템을 위한 스마트 엔드 이펙터’ 과제의 지원을 받아서 수행됐다.


한국기계연구원
케이콘텐츠
