



포스코건설, 터널공사에 4족 자율보행 로봇 이용 안전·품질 관리ㅣ터널공사의 원격 제어 로봇 사용 VIDEO:Robotic Tunneling: Improving Tunneling Safety and Productivity




도면 일치여부 확인 안전사고 방지
포천~화도고속도로현장 시범 적용
포스코건설이 터널공사에 무인으로 작동하는 자율보행 로봇을 이용해 안전·품질 관리에 나선다.
자율보행 로봇은 바퀴 대신 4족을 달아 장애물이나 복잡한 지형에서 이동이 가능해 그동안 군사 정찰이나 석유 굴착 현장의 가스 누출 탐지 등 위험한 작업에서 주로 활용돼 왔다.

포스코건설은 최근 '포천~화도 고속도로 4공구' 현장의 터널공사에 자율보행 로봇을 시범 적용해 효과 입증을 마쳤다고 13일 밝혔다.
자율보행 로봇에 앞으로 레이저로 지형을 측정하는 LiDAR(Light Detection and Ranging)와 고성능 카메라를 탑재한 상태로 발파 작업 직후 인력이 투입되기 전에 낙하위험이 있는 암반과 터널 내부의 시공오류, 균열 등의 위험요소를 사전에 확인하는 업무를 수행하게 된다.
이와 함께 포스코건설은 자율보행 로봇과 함께 지형·토공량 등의 사업부지 정보를 제공하는 'Pos-Site' 시스템에 LiDAR를 탑재한 드론과 측량 작업자 없이 경사면을 굴착하고 매설물이 있는 토지의 정밀한 굴착이 가능하도록 각종 계측기를 부착한 굴삭기를 현장에서 적극 적용하고 있다.
포스코건설 관계자는 "현장에서 근무하는 작업자들의 안전을 지키고 현장 작업의 효율성 제고를 위해 스마트컨스트럭션 기술을 빠르게 도입하고 있다"며 "앞으로 모든 공사현장을 안전하고 일하기 편리한 일터로 만들기 위한 ESG경영을 적극 실천해 나가겠다"고 말했다.
[조성신 매경닷컴 기자 robgud@mk.co.kr] 매일경제
안전성 생산성 이점 극대화
터널 시공은 전체 건설과 마찬가지로 속도, 안전 및 작업 품질을 개선하기 위한 새로운 혁신으로 끊임없이 발전하고 있다. 터널링 장비의 발전에서부터 오래된 프로세스를 완료하는 새로운 방법에 이르기까지, 잠재적인 수익 증대 개발에 대한 정보를 계속 제공하는 것이 건설사의 최대 관심사이다.
https://tunnelingonline.com/robotic-tunneling-improving-tunneling-safety-and-productivity/
많은 건설사들이 많은 지하 응용 분야에서 원격 제어 장비로 성공을 거두었다. 이러한 장비는 기존 방법에 비해 상당한 안전성과 생산성 이점을 제공하며, 시공사가 인력을 더 잘 활용할 수 있도록 지원한다. 다양한 부착 장치와 전체적인 다기능성은 터널과 파이프의 굴착, 청소 등을 직경 최대 9M까지 처리할 수 있게 한다.

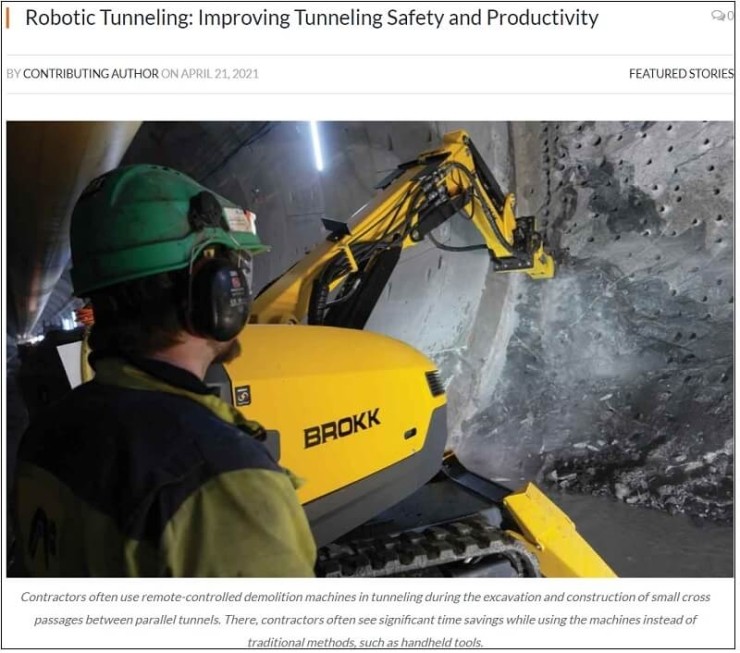
원격 해체 로봇 Remote-Controlled Demolition Robots
원격 제어가 가능한 철거 장비는 작업 현장에 높은 안전성과 효율성을 가져다 준다. 이 기계의 소형 크기에 비해 강력한 작업 팔은 동일한 중량 등급의 굴삭기보다 훨씬 큰 높은 중량 대 출력 비율을 나타낸다. 작업자는 낙하하는 이물질 및 기타 위험으로부터 멀리 떨어진 안전한 거리에서 장비를 원격으로 유도한다.

수압 해체 로봇 Hydrodemolition robots
이 수압 해체 로봇은 터널링 프로젝트 동안 개선된 결과를 제공하는 또 다른 원격 제어 유형의 장비이다.

이 로봇은 15,000 ~ 40,000 psi의 고압수를 사용하여 터널 벽에서 느슨하거나 변질된 콘크리트를 제거하고 나중에 신선하고 강한 물질로 대체한다. 또한 시공자는 가벼운 재료 제거 또는 표면 준비에 이 장비를 사용한다.

터널 시공의 개선 Tunneling Innovations
터널 개발, 터널 확장, 교차로 굴착 또는 터널 벽 콘크리트 제거에 대한 새로운 접근 방식을 취하는 것은 프로젝트 속도와 품질을 향상시키는 동시에 작업자의 위험을 줄이려는 건설업자에게 도움이 될 수 있다. 원격조종 장비는 작업자를 작업 완료 후 안전하게 귀가시키는 데 큰 도움을 준다.
황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
Demolition in the tunneling industry
KCONTENTS
