



김상배 MIT 교수팀, 고속 정밀성 탁구로봇 개발...선수급 반응 속도 Ping pong bot returns shots with high-speed precision




탁구봇, 고속 정밀성으로 샷 리턴
시속 42마일(67km)의 공 속도와 88%의 정확도를 갖춘 탁구 로봇 개발
이 기술은 미래의 선수를 훈련하는 것 외에도 수색 및 구조 등 다른 인간형 로봇의 역량을 확장할 수 있습니다.
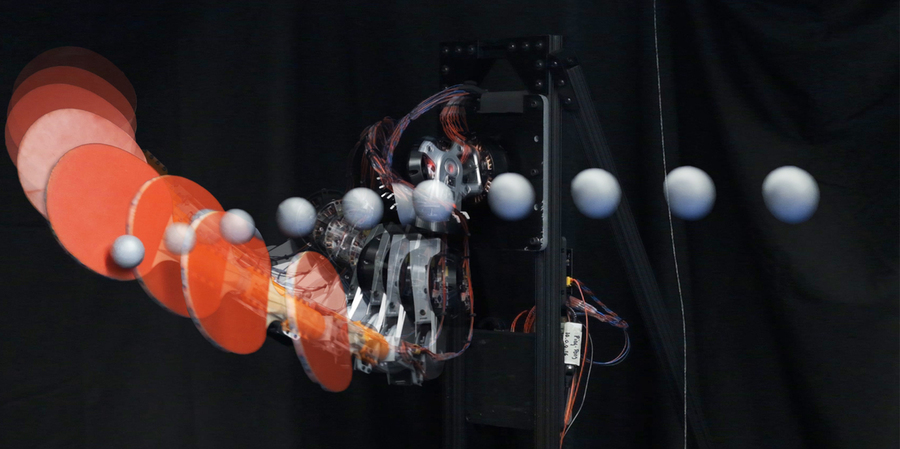
MIT 엔지니어들은 고속 정밀성으로 샷을 반사하는 강력하면서도 가벼운 디자인으로 로봇 탁구 게임에 참여하고 있습니다.
초고속 카메라와 예측 제어 시스템으로 무장,
향후 수색·구조 로봇 기술 응용 기대
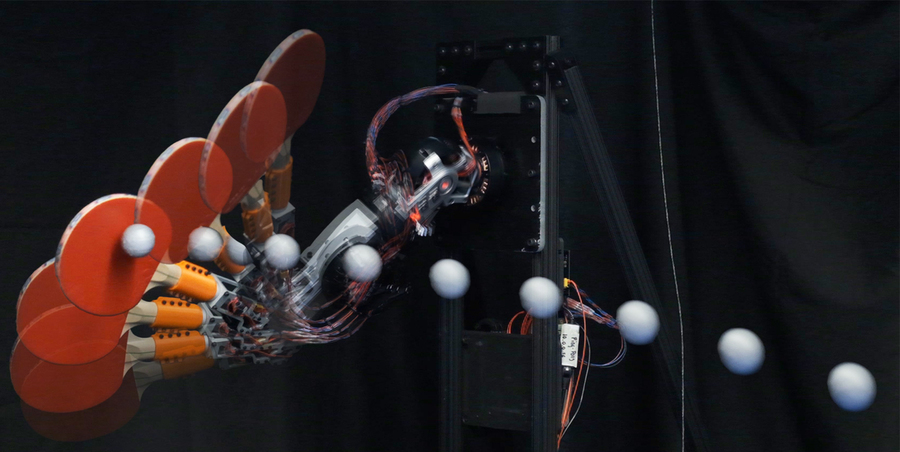
새로운 탁구 로봇은 탁구대 한쪽 끝에 고정된 다관절 로봇팔로 구성되어 있으며, 일반 탁구채를 사용합니다. 여러 대의 고속 카메라와 고대역폭 예측 제어 시스템의 도움을 받아, 로봇은 들어오는 공의 속도와 궤적을 빠르게 예측하고 루프, 드라이브, 찹 등 여러 가지 스윙 유형 중 하나를 실행하여 다양한 스핀으로 공을 테이블의 원하는 위치에 정확하게 맞힙니다.
테스트에서 엔지니어들은 탁구대 건너편에서 로봇에게 150개의 공을 차례로 던졌습니다. 로봇은 세 가지 스윙 유형 모두에서 약 88%의 적중률로 공을 성공적으로 받아냈습니다. 로봇의 타격 속도는 인간 선수의 최고 리턴 속도에 근접하며, 다른 로봇 탁구 디자인보다 빠릅니다.
현재 연구팀은 로봇의 플레이 반경을 늘려 더욱 다양한 샷을 리턴할 수 있도록 하는 방안을 모색하고 있습니다. 이를 통해, 이 시스템이 성장하는 스마트 로봇 훈련 시스템 분야에서 경쟁력 있는 경쟁자가 될 수 있을 것으로 기대하고 있습니다.
연구팀은 탁구 기술을 게임 외에도 인간형 로봇의 속도와 반응성을 향상시키는 데 적용할 수 있다고 밝혔습니다. 특히 수색 및 구조 시나리오와 로봇이 신속하게 반응하거나 예상해야 하는 상황에서 유용할 것으로 기대됩니다.
MIT 대학원생 데이비드 응웬은 "우리가 해결하고 있는 문제, 특히 물체를 정말 빠르고 정확하게 가로채는 것과 관련된 문제는 로봇이 동적 기동을 수행하고 실시간으로 엔드 이펙터가 물체와 만나는 위치를 계획해야 하는 시나리오에서 잠재적으로 유용할 수 있습니다."라고 말했습니다.
응우옌은 MIT 대학원생 켄드릭 칸시오, 그리고 기계공학 부교수이자 MIT 생체모방 로봇 연구실 소장인 김상배와 함께 이 연구의 공동 저자입니다 . 연구진은 이번 달 IEEE 국제 로봇 및 자동화 컨퍼런스(ICRA)에서 해당 실험 결과를 논문 으로 발표할 예정입니다 .
정확한 플레이
탁구를 치는 로봇을 만드는 것은 1980년대부터 연구자들이 시도해 온 도전 과제입니다. 이 과제는 고속 머신 비전, 빠르고 민첩한 모터와 액추에이터, 정밀한 매니퓰레이터 제어, 정확한 실시간 예측, 그리고 고차원적인 게임 전략 계획 등 다양한 기술의 고유한 조합을 필요로 합니다.
"로봇 제어 문제의 스펙트럼을 생각해 보면, 한쪽 끝에는 물체를 집어 들고 제대로 잡는지 확인하는 것처럼 보통 느리고 매우 정밀한 조작이 있습니다. 다른 한쪽 끝에는 역동적으로 움직이고 시스템의 교란에 적응하는 이동이 있습니다."라고 응우옌은 설명합니다. "탁구는 이 두 가지 사이에 위치합니다. 공을 정확하게 쳐야 한다는 점에서 여전히 조작이지만, 300밀리초 이내에 공을 쳐야 합니다. 따라서 동적 이동과 정밀 조작이라는 유사한 문제들이 균형을 이루고 있습니다."
탁구 로봇은 1980년대 이후 큰 발전을 거듭해 왔으며, 최근에는 오므론과 구글 딥마인드가 개발한 로봇이 등장했습니다. 이 로봇들은 인공지능 기술을 활용하여 이전 탁구 데이터를 "학습"하고, 점점 더 다양해지는 스트로크와 샷에 대한 로봇의 성능을 향상시킵니다. 이러한 로봇들은 중급 수준의 인간 선수들과 경쟁할 만큼 빠르고 정확한 것으로 입증되었습니다.
"이 로봇들은 탁구를 하도록 설계된 특수 로봇입니다."라고 칸시오는 말합니다. "저희 로봇을 통해 탁구에 사용되는 기술이 어떻게 더욱 일반화된 시스템으로 변환될 수 있는지, 예를 들어 인간형 로봇이나 의인화된 로봇처럼 다양하고 유용한 기능을 수행할 수 있는지 탐구하고 있습니다."
게임 컨트롤
연구진은 새로운 설계를 위해 김 교수 연구실에서 MIT 휴머노이드(Humanoid)의 일부로 개발한 가볍고 강력한 로봇 팔을 개조했습니다. 휴머노이드는 두 발로 걷는 두 팔 로봇으로, 어린아이만 한 크기입니다. 연구팀은 이 로봇을 이용하여 고르지 않고 다양한 지형을 탐색하고, 점프, 달리기, 백플립 등 다양한 동적 기동을 시험하고 있으며, 언젠가 이러한 로봇을 수색 및 구조 작업에 투입하는 것을 목표로 하고 있습니다.
휴머노이드의 각 팔에는 네 개의 관절, 즉 자유도가 있으며, 각 관절은 전기 모터로 제어됩니다. 칸시오, 응우옌, 그리고 김은 유사한 로봇 팔을 제작하여, 손목에 자유도를 추가하여 탁구 라켓을 제어할 수 있도록 개조했습니다.
연구팀은 로봇 팔을 일반 탁구대 한쪽 끝에 있는 테이블에 고정하고, 테이블 주변에 고속 모션 캡처 카메라를 설치하여 로봇에 튕겨지는 공을 추적했습니다. 또한 수학과 물리 원리를 기반으로 특정 스윙 유형(루프(또는 탑스핀), 드라이브(스트레이트온), 찹(백스핀))으로 들어오는 공을 치기 위해 팔이 어떤 속도와 패들 방향을 실행해야 하는지 예측하는 최적 제어 알고리즘을 개발했습니다.
그들은 카메라 이미지를 동시에 처리하고, 공의 실시간 상태를 추정하고, 이러한 추정치를 로봇 모터에 대한 명령으로 변환하여 빠르게 반응하고 스윙하도록 하는 3대의 컴퓨터를 사용하여 알고리즘을 구현했습니다.
팔에 150개의 공을 연속으로 튕겨낸 후, 로봇의 적중률, 즉 공을 되돌리는 정확도가 세 가지 스윙 유형 모두에서 거의 동일하다는 것을 발견했습니다. 루프 스트라이크는 88.4%, 찹은 89.2%, 드라이브는 87.5%였습니다. 이후 로봇의 반응 속도를 조정한 결과, 로봇 팔이 기존 시스템보다 초당 20미터의 속도로 공을 더 빠르게 치는 것을 확인했습니다.
연구팀은 논문에서 로봇의 타격 속도, 즉 패들이 공을 치는 속도가 평균 초당 11미터라고 보고했습니다. 숙련된 인간 선수들은 초당 21미터에서 25미터 사이의 속도로 공을 리턴하는 것으로 알려져 있습니다. 초기 실험 결과를 발표한 이후, 연구진은 시스템을 더욱 개선하여 최대 초당 19미터(시속 약 42마일)의 타격 속도를 기록했습니다.
"이 프로젝트의 목표 중 하나는 사람들이 가진 것과 같은 수준의 운동 능력에 도달하는 것입니다."라고 응우옌은 말합니다. "그리고 타격 속도 측면에서는 정말, 정말 가까이 다가가고 있습니다."
후속 연구를 통해 로봇의 조준도 가능해졌습니다. 연구팀은 시스템에 제어 알고리즘을 통합하여 들어오는 공을 어떻게, 그리고 어디로 쳐야 할지 예측했습니다. 최신 버전에서는 연구원들이 테이블 위에 목표 위치를 설정하면 로봇이 그 위치로 공을 쳐냅니다.
로봇은 테이블에 고정되어 있기 때문에 이동성과 도달 범위가 제한적이며, 주로 테이블 중앙선 주변의 초승달 모양 영역 내에 도착하는 공을 되돌려 보낼 수 있습니다. 앞으로 엔지니어들은 로봇을 갠트리 또는 바퀴 달린 플랫폼에 장착하여 테이블의 더 넓은 영역을 커버하고 더욱 다양한 샷을 되돌려 보낼 계획입니다.
"탁구에서 중요한 것은 상대의 타격 방식을 바탕으로 공의 스핀과 궤적을 예측하는 것입니다. 자동 공 발사기는 이러한 정보를 제공하지 않습니다."라고 칸시오는 말합니다. "이런 로봇은 상대가 실제 경기에서 사용하는 동작을 모방하여 인간의 플레이와 실력 향상에 도움을 줄 수 있습니다."
이 연구는 로봇 및 AI 연구소의 일부 지원을 받았습니다.
Ping pong bot returns shots with high-speed precision
https://news.mit.edu/2025/ping-pong-bot-returns-shots-high-speed-precision-0508
MIT Table Tennis Robot
KCONTENTS
