



MIT 재미 로봇 과학자의 쓴 소리...한국 R&D엔 R은 없고 D만 있다"




로봇공학자 김상배 MIT 교수
젠슨 황 엔비디아 최고경영자(CEO)는 올해 1월 CES 2025 기조연설에서 “다음은 피지컬 AI 시대가 될 것”이라고 말했다. 인공지능(AI)을 탑재하고, 인간과 동일한 물리적 공간에서 움직이는 로봇과 자율 주행차 등이 본격 등장할 것이라고 공언했다.
최근 휴머노이드의 동작은 각 관절에 달린 소형 전기 모터로 제어된다. 로봇 구동 방식의 패러다임을 유압(기름의 압력)식에서 전기 모터식으로 바꾼 사람이 김상배(50) 매사추세츠공대(MIT) 기계공학과 교수다. 최근 미국 매사추세츠주 케임브리지에 있는 MIT 연구실에서 그를 만났다.

−전기 모터를 장착한 ‘미니 치타’ 로봇이 백 덤블링 하는 모습은 놀라웠다. 요즘 중국 로봇들은 ‘칼군무’도 잘하더라.
“사실 인터넷 찾아보면 20년 전에 이미 아시모 로봇(일본 혼다가 개발한 휴머노이드)이 춤추는 동영상도 많다. 전혀 새로운 기술이 아니다. 그런 영상이 화제가 되는 이유는 한 영상에서 수십 대를 보여줘서 그렇다. 로봇을 과거보다 싸게 만들 수 있게 되면서 가능해졌다. 그런 기업들은 ‘우리는 이 정도까지 할 수 있다’라며 프로모션(판촉)을 하는 것이다. 일반인들은 로봇이 뛰고 뒤로 넘고 하는 장면을 보며 ‘아 이제 거의 다 됐다’라고 착각한다. 엄밀히 말하면, 아직 할 수 있는 게 그 정도라는 거다.”
−휴머노이드 로봇 개발은 왜 그렇게 어렵나.
“로봇 입장에서 보면 물건의 무게가 조금이라도 달라지면, 대처하는 것이 아주 어렵다. 휴대전화를 집는 알고리즘(미리 입력된 규칙)으로 고양이를 들어 올릴 수 없다. (기자에게) 주머니에 손을 넣고 안에 있는 물체를 꺼내봐라. 지금 그 물건을 꺼낼 때 엄지손가락 두 번째 마디가 어떻게 움직였는지 기억나나? 우리가 의식하지 못하는 영역에서 돌아가는 알고리즘이 있다는 말이다. 공장 안에서 움직이는 로봇 손을 예로 들면, 10kg짜리 모래주머니를 집어 들고, 카드도 집을 수 있는 로봇은 없다. 이 부분을 해결해야 한다.”

−언제 사람 수준의 휴머노이드가 나올까.
“아무도 모른다. 지금까지 1000의 노력을 부어서 99.9 수준에 왔다고 치자. 하지만 1000의 노력을 더 부어도 0.1의 부족을 해결하지 못할 수 있다. 사람 수준은 아니더라도 휴머노이드가 실생활에 쓰이는 것은 머지않아 가능할 것이다. 로봇에게 ‘다양한 형태의 여러 가지 물건을 집어라’고 하는 수준은 10년 안에 가능할 것으로 보인다.”
김 교수는 2006년 미국 스탠퍼드대 박사 과정 시절 만든 이른바 ‘도마뱀 로봇’ 스티키봇(Stickybot)이 타임지 선정 ‘올해 최고의 발명품 44개’에 꼽히며 유명해졌다.
−‘도마뱀 로봇’은 잘 있나? 많이 진화했을 텐데.
“그 원리를 응용한 로봇들이 건설 현장이나 재난 현장에 투입돼 벽을 오르내리며 활약하고 있다. 지도 교수가 도마뱀 로봇이라는 과제를 추진할 때, 사실 내가 속한 연구실은 ‘발’만 만들면 됐다. 그런데 다른 랩의 연구 속도가 늦었다. 답답해서 지도교수에게 ‘내가 다 만들어 보겠다’고 했다. 흔쾌히 해보라고 했다. 안 해도 되는 걸 하는 거라서 실패에 대한 부담이 적었다. 상명하복 문화가 강한 한국의 실험실에서는 생각하기 어려운 일이었다.”
−한국은 산업용 로봇을 가장 많이 쓰는 국가다. 하지만 혁신적인 로봇은 없는데.
“외국에서 오래 공부한 한국 교수와 학생들은 이미 세계적인 수준이다. 문제는 그들을 연구에 전념할 수 없게끔 하는 한국의 문화다. 연구 과제를 선정할 때 한국에서 가장 먼저 하는 질문은 ‘미국에서 하고 있느냐’는 것이다. 새로운 학문과 기술에 대해 연구를 시작하지 않고 미국이 이미 시작한 기술을 따라가는 패스트 팔로어(fast follower) 전략을 사용한다는 것이다. 미국에서 하지 않는 걸 해보겠다고 하면 ‘그런 걸 해서 뭐 하느냐’는 답부터 돌아온다. 아니, 미국에서 하는 걸 따라 하면 무슨 신기술 개발이 되나. 한국은 R&D에서 R(연구)은 안 하고 D(개발)만 하고 있다.” 그가 말하는 ‘R(Research·연구)’은 원천 기술과 기초 과학에 관한 탐구, ‘D(Development·개발)’는 기존 기술을 잘 활용해 단기간에 좋은 제품을 만드는 것이다.
−어떻게 하면 바뀔까?
“교수들에게 물어보면 ‘하는 일의 50% 이상은 연구비를 따내는 것’이라고 할 것이다. 정부나 기업이 발주한 연구 과제에 많이 선정돼야 한다. 그런데 한국에서 연구 과제를 평가할 때 ‘정성 평가’가 아닌 ‘정량 평가’를 한다. 평가 항목 중 정량 평가는 대부분 이전 연구 결과와 비교해서 측정한다. 그 기준을 못 맞추면 돈을 물어내는 경우가 있다. 기존에 없던 새로운 아이디어를 내고 테스트하는 연구라면, 그걸 도대체 어떻게 정량 평가를 한다는 것인가. 진짜 상상을 초월하는 시스템이다. 연구 과제를 위한 제안서도 한국에선 말도 안 되게 많은 양을 요구한다. 대기업 같은 곳에 연구하겠다고 프러포즈(제안서)를 쓸 때는 10장 이내면 충분하다. 최근 한국 정부에 낼 때는 400장을 냈다. 다 읽지도 못하는 걸 내라는 건데 이게 얼마나 시간 낭비냐. 그 시간에 연구를 더 하는 게 낫다.”
김 교수는 4족 보행 로봇 이후 ‘로봇 손’이 휴머노이드 구현의 핵심이라고 판단해 최근 관련 연구를 진행 중이다. 2023년엔 센서를 통해 다양한 형태의 물체를 잡을 수 있는 로봇 ‘그리퍼(gripper)’를 선보였다. 연구실을 방문한 이날도 그의 랩에서는 수십 명의 학생이 연구에 몰두하고 있었다. 연구실 가운데에는 ‘MIT 휴머노이드’라는 이름의 휴머노이드 로봇이 서 있었다.
−휴머노이드 로봇 상용화의 마지막 허들은 뭐가 될까.
“신뢰도다. 로봇이 1분에 물건을 100번 집는다고 했을 때 신뢰도 99.9는 1000번에 1번 실수한다는 의미다. 그럼 1시간에 6번 실수하게 되는데 현실에서 이런 로봇을 쓸 수 있을 것 같나. 피지컬 세상에서는 눈곱만큼만 잘못돼도 물건이 박살 난다.”
−한국은 휴머노이드 경쟁에서 어떤 부분에 집중해야 하나.
“비주얼 랭귀지 모델(이미지와 텍스트를 함께 이해하는 AI 모델)은 이미 미국과 중국으로 헤게모니가 넘어갔다. 한국은 AI로 어떻게 로봇 같은 피지컬 AI를 만드느냐에 집중해야 한다. 이 부분이 익사이팅(흥미진진)할 거다.”
벽 타는 ‘도마뱀 로봇’으로 대학원 때부터 세계 주목
뒤로 공중 점프·방향 전환… 치타 로봇 시리즈로 또 눈길
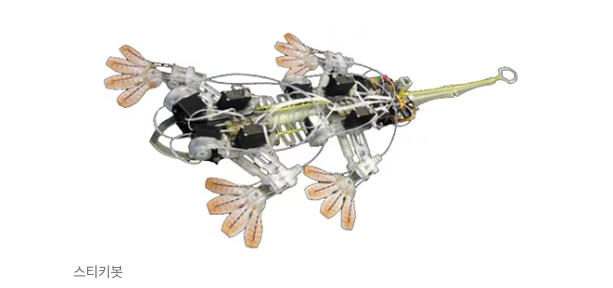
김상배 교수가 2006년 개발한 스티키봇은 도마뱀에서 영감을 받아 만든 것이다. 도마뱀의 발바닥 털 구조를 모방했다. 도마뱀 발바닥은 수백만 개의 작은 털로 덮여 있다. 미세한 털과 벽면 사이에는 인력(서로 잡아당기는 힘)이 작용해 접착제 없이도 벽면에 붙을 수 있다. 김 교수는 도마뱀 발의 털을 실리콘으로 제작했고, 굵기는 사람 머리카락의 약 4배 정도다.

치타 로봇은 치타처럼 네 발로 달리는 4족 보행 로봇이다. 관절에 탑재된 전기 모터로 구동돼, 더 자연스러운 움직임을 모방할 수 있다. 이전의 로봇은 유압(기름의 압력)식으로 움직이기 때문에 크고 무거웠다. 치타 로봇은 실제 치타처럼 달리고, 방향 전환과 점프도 가능하다. 작은 크기로 만든 미니 치타는 공중에서 뒤로 한 바퀴 도는(백플립) 4족 보행 로봇으로 주목받았다.
김상배 교수는
2001년 연세대 기계공학과를 졸업하고 미국 스탠퍼드대에서 박사 학위를 받았다. 박사 과정 때 도마뱀처럼 벽을 타고 오르는 로봇 스티키봇(Stickybot)을 만들어 미 타임지 선정 2006년 ‘올해 최고의 발명품 44개’로 꼽히며 세계적 주목을 받았다. 2009년 MIT 기계공학과 교수로 임용됐다. 2013년엔 미국 국방부 고등연구계획국으로부터 젊은 과학자상을 받았다. 그가 발표한 논문의 총 피인용 건수는 1만8000여 건에 이른다.
휴머노이드 로봇
머리와 2개의 팔, 2개의 다리, 손가락·발가락 등 인간의 모습을 한 로봇을 말한다. 생산 현장과 집 등 인간이 활동하는 공간은 인간 인체에 맞게 설계돼 있다. 따라서 로봇개 같은 4족 보행 로봇 등과 비교해 활용성이 훨씬 뛰어나지만, 중심 잡기와 손·발가락 등 정밀 제어 기술이 필요하다. 최근 AI와 결합해 관련 기술이 급속히 발전하고 있다.
케임브리지=윤주헌 특파원 조선일보
kcontents
