



스탠포드대, 더 빨리 걷고 뛸 수 있는 외골격 발 개발 VIDEO: Stanford exoskeleton walks out into the real world




Construction, Science, IT, Energy and all other issues
Search for useful information through the top search bar on blog!
건설,과학,IT, 에너지 외 국내외 실시간 종합 관심 이슈 발행
[10만이 넘는 풍부한 데이터베이스]
블로그 맨 위 상단 검색창 통해 유용한 정보를 검색해 보세요!
스탠포드 바이오메카트로닉스 연구소
적은 노력으로 더 빨리 걷고 뛸 수 있어
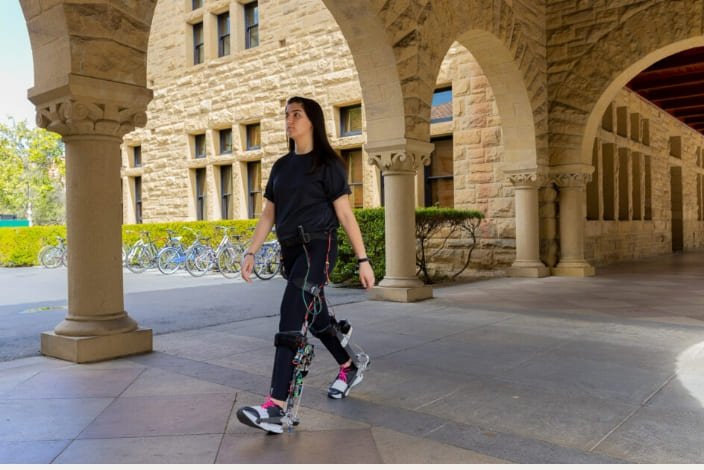
수년간의 신중한 개발 끝에, 엔지니어들은 걷는 속도를 높이고 실험실 밖의 노력을 줄이는 부츠 같은 외골격을 만들어냈다.
수년 동안 스탠포드 바이오메카트로닉스 연구소는 착용자가 적은 노력으로 더 빨리 걷고 뛸 수 있도록 돕는 실험실 기반 로봇 장치인 외골격 에뮬레이터로 상상력을 사로잡았다. 이제, 이 연구원들은 10월 12일 네이처지에 실린 논문에 실린 그들의 첫 번째 얽매이지 않은 외골격으로 "실제현장"에서 머리를 내밀 것이다.
스탠포드 바이오메카트로닉스 연구소를 이끄는 스티브 콜린스 기계공학과 부교수는 "이 외골격은 사람들이 현실 세계를 정상적으로 걸을 때 도움을 개인화한다"고 말했다. "그리고 그것은 걷는 속도와 에너지 경제에서 예외적으로 향상되는 결과를 낳았다.
- 포스텍, 전 영역 동시 인식 고정형 라이다 센서 개발 ㅣ 카이스트, 상상만으로 원하는 방향 사용가능 로봇 팔 뇌-기계 인터페이스 개발
- "세계 최초 미세 바늘까지 잡을 수 있는 코끼리 코 로봇 손 개발" 한국기계연구원
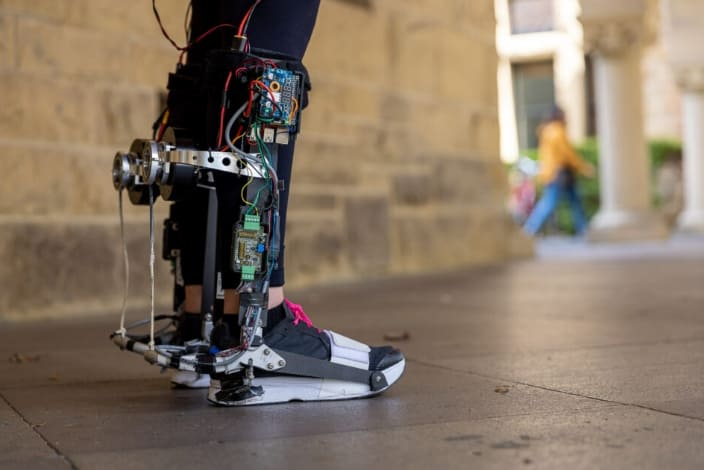
이 "로보틱 부츠"는 착용자에게 매 걸음마다 추가적인 힘을 주기 위해 종아리 근육과 함께 작동하는 모터를 가지고 있다. 그러나, 다른 외골격과는 달리, 이 추진력은 에뮬레이터를 사용하여 수년간 작업한 기계 학습 기반 모델 덕분에 개인화된다.
"러닝머신에서 우리의 장치는 이전의 외골격에 비해 두 배의 에너지를 절약합니다,"라고 스탠포드 대학의 우차이 휴먼 퍼포먼스 얼라이언스 포스트 닥터 펠로우로 외골격을 연구한 패트릭 슬레이드는 말했다. "실제 세계에서는 상당한 에너지 절약과 보행 속도 향상으로 이어집니다."
궁극적인 목표는 이동 장애가 있는 사람들, 특히 노인들이 그들이 원하는 대로 전 세계로 이동할 수 있도록 돕는 것이다. 이 최근의 돌파구로, 연구팀은 이 기술이 앞으로 몇 년 안에 상용화될 준비가 되었다고 믿고 있다.
"처음 외골격을 착용하는 것은 약간의 조정이 될 수 있습니다," 라고 실험에서 외골격을 착용한 바이오메카트로닉스 연구소의 대학원생 아바 락마헤리가 말했습니다. "하지만, 솔직히, 걷고 나서 15분 안에, 그것은 꽤 자연스럽게 느끼기 시작한다. 말 그대로 외골격과 함께 걷는 것은 당신의 발걸음에 여분의 스프링이 있는 것처럼 느껴진다. 그러면 다음 단계를 훨씬 더 쉽게 수행할 수 있습니다."
현실 세계를 위한 외골격
과거에 효과적인 외골격의 주요 장벽은 개인화였다. 콜린스는 "대부분의 외골격은 직관이나 생체모방의 조합을 사용하여 설계되지만, 사람들은 너무 복잡하고 다양해서 잘 작동하지 않는다"고 설명했다.
이 그룹은 이 문제를 해결하기 위해 외부 골격 에뮬레이터(대형, 움직이지 않는 고가의 실험실 설정)에 의존했습니다. 이 장치는 사람들을 지원하는 최선의 방법을 신속하게 테스트하고 실험실 밖에서 사용할 수 있는 효과적인 휴대용 장치에 대한 청사진을 발견할 수 있습니다. 학생들과 자원봉사자들이 에뮬레이터에 연결되면서, 연구원들은 사람이 외골격을 가지고 걷는 방법이 그들이 얼마나 많은 에너지를 사용하고 있는지 이해하기 위해 움직임과 에너지 소비 데이터를 수집했다.
이러한 데이터는 에뮬레이터가 제공하는 다양한 종류의 지원의 상대적 이점을 보여주었다. 그것은 또한 실제의 외골격이 각 착용자에게 적응하기 위해 현재 사용하는 기계 학습 모델을 알려주었다. 에뮬레이터와 달리 테가 없는 외골격은 부팅에 통합된 저렴한 웨어러블 센서만 사용하여 움직임을 모니터링할 수 있다.
"우리는 정확한 지원을 제공하기 위해 웨어러블을 통해 힘과 발목 움직임을 측정합니다."라고 Slade는 말했다. "이렇게 함으로써, 우리는 사람들이 걸을 때 그 장치를 조심스럽게 제어할 수 있고 안전하고 눈에 띄지 않는 방법으로 그들을 도울 수 있습니다."

- ‘사람 같은’ 전자피부 로봇 VIDEO: Touchlab to begin piloting its robotic skin sensors in a hospital setting
- 물건을 쉽게 잡고 잡을 수 있는 가성비 좋은 로봇 손 Anthropomorphic Clone Hand grasping different objects
30파운드짜리 외골격 부츠
외골격은 걷기를 쉽게 하고 발목의 토크를 가해 속도를 높여 종아리 근육의 기능 일부를 대체할 수 있다. 사용자가 발을 내딛을 때 발가락이 지면을 벗어나기 직전에 이 장치는 발을 밀어내는 데 도움을 준다.
황기철 콘페이퍼 에디터 국토부 인플루언서
Ki Chul Hwang Conpaper editor influencer
Stanford exoskeleton walks out into the real world
(Source:
news.stanford.edu/2022/10/12/exoskeleton-makes-walking-faster-less-tiring/)
kcontents
