



자동화 건설용 장비 상용화에 한국은 왜 유독 늦을까




건설용 아닌 재난 구조용으로 개발
상용화 단계에서 제동
(편집자주)
스위스는 로봇 굴착기에 AI…韓 연구비 없어 창고 신세
취리히 연방공대, 로봇 굴착기로 둘담 건설 시연
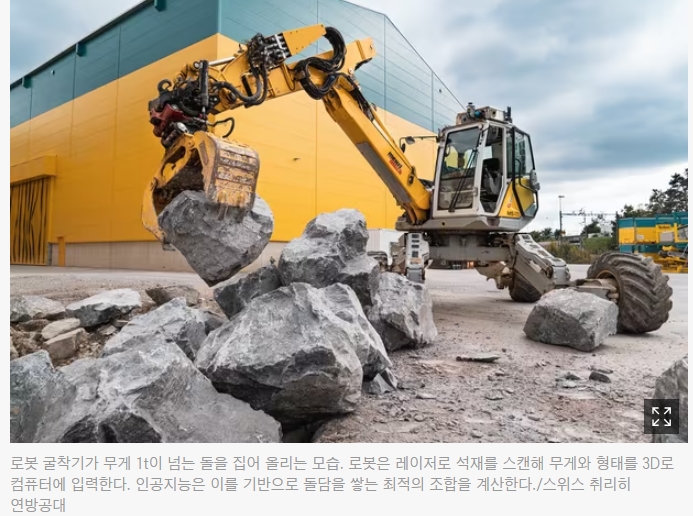
굴착기가 집게로 1t이 넘는 돌을 집어 들어 담을 쌓는다. 집게 대신 삽을 갈아 끼우고 주변 터도 깎아 다진다. 공사장에서 흔히 보는 모습이지만 큰 차이가 있다. 굴착기 운전석에 사람이 보이지 않는다. 바로 인공지능(AI)이 작동하는 로봇 굴착기이다
인공지능이 석재 쌓는 최적의 조합법 계산해
지지대, 시멘트 없어도 단단, 폐기물도 재활용
국산 로봇 굴착기는 연구비 끊겨 상용화 못해

스위스 취리히 연방공대의 마르코 후터(Marco Hutter) 교수 연구진은 지난 22일 국제 학술지 ‘사이언스 로보틱스’에 “현지 조달한 자재로 돌담을 쌓을 수 있는 로봇 굴착기를 개발했다”고 밝혔다.
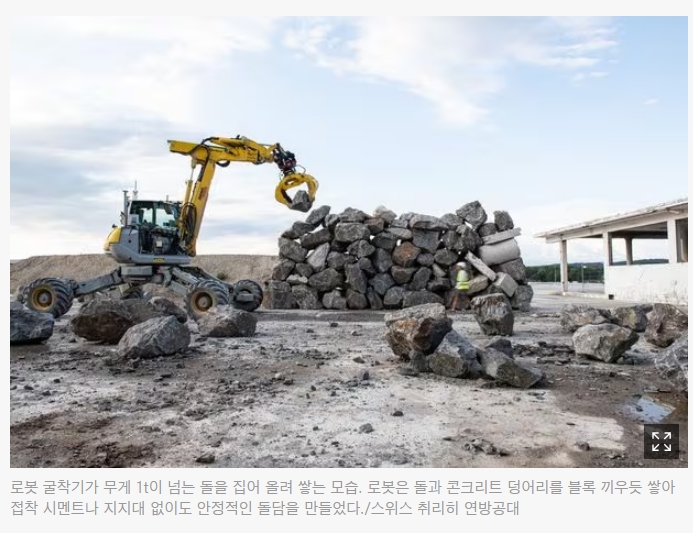
무게가 12t인 로봇은 취리리 근교 공원에서 집게로 바위와 폐석자재를 들어 올려 폭 1.8m, 높이 6m인 돌담을 65.5m 길이로 쌓았다. 집게 대신 삽을 끼워 주변 땅을 파서 설계도에 맞게 다지는 작업도 진행했다. 연구진은 “대규모 건식 석벽을 건설하는 데 최초로 로봇 굴착기를 적용했다”며 “인공지능 로봇이 건설업의 생산성을 높이고 지속 가능한 성장을 이끌 수 있다”고 밝혔다.
혼자 돌담 쌓는 로봇: 스위스 ETH 취리히 대 VIDEO: Robot builds dry stone walls all by itself
혼자 돌담 쌓는 로봇: 스위스 ETH 취리히 대 VIDEO: Robot builds dry stone walls all by itself
스위스 ETH 취리히 대학의 한 팀은 무작위로 생긴 바위와 콘크리트 잔해로 마른 돌담을 만들 수 있는 자율 굴착기를 공개했습니다. 그것은 알고리즘에 의해 안내된 센티미터의 정밀도로 그것들
conpaper.tistory.com
스위스 취리히 연방공대가 개발한 로봇 굴착기는 인공지능으로 석제를 샇는 최적의 조합을 계산한다. 그 결과 취리리 근교 공원에서 폭 1.8m, 높이 6m인 돌담을 65.5m 길이까지 쌓았다./스위스 취리히 연방공대
자재를 3D로 디지털화, 지지대 없이 쌓아
건설업은 전 세계 국내총생산(GDP)의 10% 이상을 차지한다. 하지만 노동 생산성은 지난 20년간 연평균 1% 성장에 그쳤다. 많은 장비가 기계화됐다고 하지만, 여전히 사람이 필요한 작업이 대부분이다. 게다가 연간 30억t 이상 폐기물도 발생해 지속 가능한 성장을 방해하고 있다.
후터 교수 연구진은 건설 현장의 대표적 장비인 굴착기를 스스로 생각하고 움직이는 로봇으로 바꿨다. 로봇 굴착기는 레이저 거리 측정계인 라이다(LiDAR)로 지형과 자재를 파악한다. 레이저로 돌과 재활용 콘크리트를 스캔하고, 컴퓨터에 3D(입체)로 저장한다. 센서로 무게도 측정한다. 이렇게 디지털 자재 목록을 만든다.
굴착기의 두뇌인 인공지능은 디지털 자재 목록을 참조해 어떤 돌과 콘크리트를 어느 위치에 넣어야 설계도대로 돌담을 쌓을 수 있을지 계산한다. 다양한 조합으로 자재를 쌓는 시뮬레이션(가상실험)을 거쳐 최적의 방법을 찾는 것이다.
인공지능이 작업 순서를 결정하면 굴착기는 집게로 돌과 콘크리트 덩어리를 들어 끼워 맞춘다. 컴퓨터 테트리스 게임에서 다른 모양의 타일 블록을 끼워 맞추는 것과 비슷하다. 덕분에 시멘트를 바르거나 지지대를 세우지 않아도 안정적인 돌담을 쌓을 수 있다.
노동력 부족, 폐건축자재 문제도 해결
로봇 굴착기가 돌 하나를 배치하는 데 평균 12분 걸렸다. 사람이 조종할 때보다 10% 느린 속도이지만, 혼자 모든 작업을 진행해 노동력 부족 문제를 해결할 가능성을 보였다. 기존 방식으로 하면 굴착기 운전자는 물론 페인트나 끈으로 돌을 쌓을 곳을 표시하는 작업자도 필요하다. 시멘트를 바르거나 자재 사이에 자갈과 흙을 넣어 빈 틈을 채우는 작업자도 필요하다.
특히 연구진은 “로봇은 경제성과 생산성을 개선하는 것 외에 현지에서 구할 수 있는 천연 자재나 재활용 재료를 사용할 수 있어 환경 부담을 줄일 수 있다”고 밝혔다. 나중에 건축물을 허물어도 처음에 사용한 자재 목록이 컴퓨터에 남아있어 언제든 재활용할 수 있기 때문이다.
건설업의 폐기물 문제를 해결할 길이 열린 것이다. 후터 교수는 “로봇 굴착기로 담을 쌓으면 비슷한 성능의 철근 콘크리트 담을 쌓을 때와 비교해 탄소 배출을 41% 줄일 수 있다”고 밝혔다.
후터 교수는 세계적인 로봇 과학자이다. 앞서 네 발로 달리는 로봇개 ‘애니말(ANYmal)’을 개발해 취리히시의 하수도 내부와 북해(北海)의 해상 변전소에서 단독 검사 작업을 진행했다. 애니말은 2021년 미 국방부 산하 방위고등연구계획국(DARPA)이 주최한 지하 탐색 로봇 경진 대회에도 참가해 1위를 차지했다. 애니말도 로봇 굴찰기처럼 라이다로 지형과 장애물을 감지한다.

국산 로봇 굴착기는 상용 연구에서 막혀
국내에서도 로봇 굴착기가 개발됐다. 조정산 한국생산기술연구원 수석연구원이 한양대, 한국전자기술연구원, 한국기계산업진흥회 연구진과 함께 개발한 ‘재난대응 특수목적기계’가 그 주인공이다. 지난 2015년부터 정부 연구비 220억원을 들여 개발했다.
스위스 로봇이 건설용이라면 국산 로봇은 건물 붕괴 같은 사고 현장에서 작업하는 구조탐색용이다. 로봇은 6t 무게 굴착기에 로봇팔 두 개가 달린 형태다. 두 팔은 각각 7가지 방향으로 움직일 수 있다. 한쪽 팔로 잔해를 들고 다른 팔로 그 아래 물체를 꺼낼 수 있다. 200㎏ 무게를 옮기고 22㎜ 굵기 철근을 절단할 수 있다.
국산 로봇 굴착기는 스위스 로봇과 달리 사람이 조종한다. 하지만 기존 방식과 다르다. 영화 아바타에 나온 전투 로봇처럼 사람의 팔이 움직이는 대로 로봇팔이 작동하는 방식이다. 로봇이 조종자의 아바타(분신)인 셈이다. 조정산 수석연구원은 “재난현장은 건설기계를 다루는 전문인력이 아니라 소방관이 주도한다”며 “소방관의 동작을 로봇팔에 구현하면 복잡하고 정교한 작업을 쉽게 조종할 수 있다”고 말했다.
당장 국산 로봇 굴착기를 재난 현장에 투입할 수는 없다. 핵심기술은 완성했지만, 실제 소방관의 동작에 맞게 작업하려면 후속 상용화 연구가 필요하기 때문이다. 그렇지만 최근 정부가 연구·개발(R&D) 예산을 감축하면서 로봇 굴착기를 사용할 소방방재청이 관련 연구 과제를 마련하지 못했다.
로봇 굴착기는 현재 시제품 1대가 제작돼 연구원 창고에 머물고 있다. 조정산 수석연구원은 “재난구조용 로봇 굴착기는 미국, 일본에서도 개발하고 있지만, 우리보다 소형”이라며 “앞으로 인공지능을 적용해 사람의 의도를 더 잘 이해하는 방식으로 개발하는 연구가 필요하다”고 말했다.

참고 자료
Science Robotics(2023), DOI: https://doi.org/10.1126/scirobotics.abp9758
Journal of Field Robotics(2022), DOI: https://doi.org/10.1002/rob.22078
이영완 과학에디터 조선일보
KCONTENTS
