



조지아공대, 험난한 지형 횡단 '미니 탐사로봇" 개발 VIDEO: Planetary Exploration Rover Avoids Sand Tra




조지아공대, 헤엄치듯 모래 언덕 오르는 '탐사 로버' 개발
지난 13일 사이언스 로보틱스에 연구결과 발표
바퀴 달린 로버는 화성 및 달에서 지형이 연약한 토양을 가로지르는 데 어려움을 겪을 수도 있다. 예를 들면 NASA가 제작한 ‘스피릿 로버(Spirit rover)’는 지난 2009년 화성탐사 도중 모래 함정에 갇혀 최후를 맞은 바 있다.

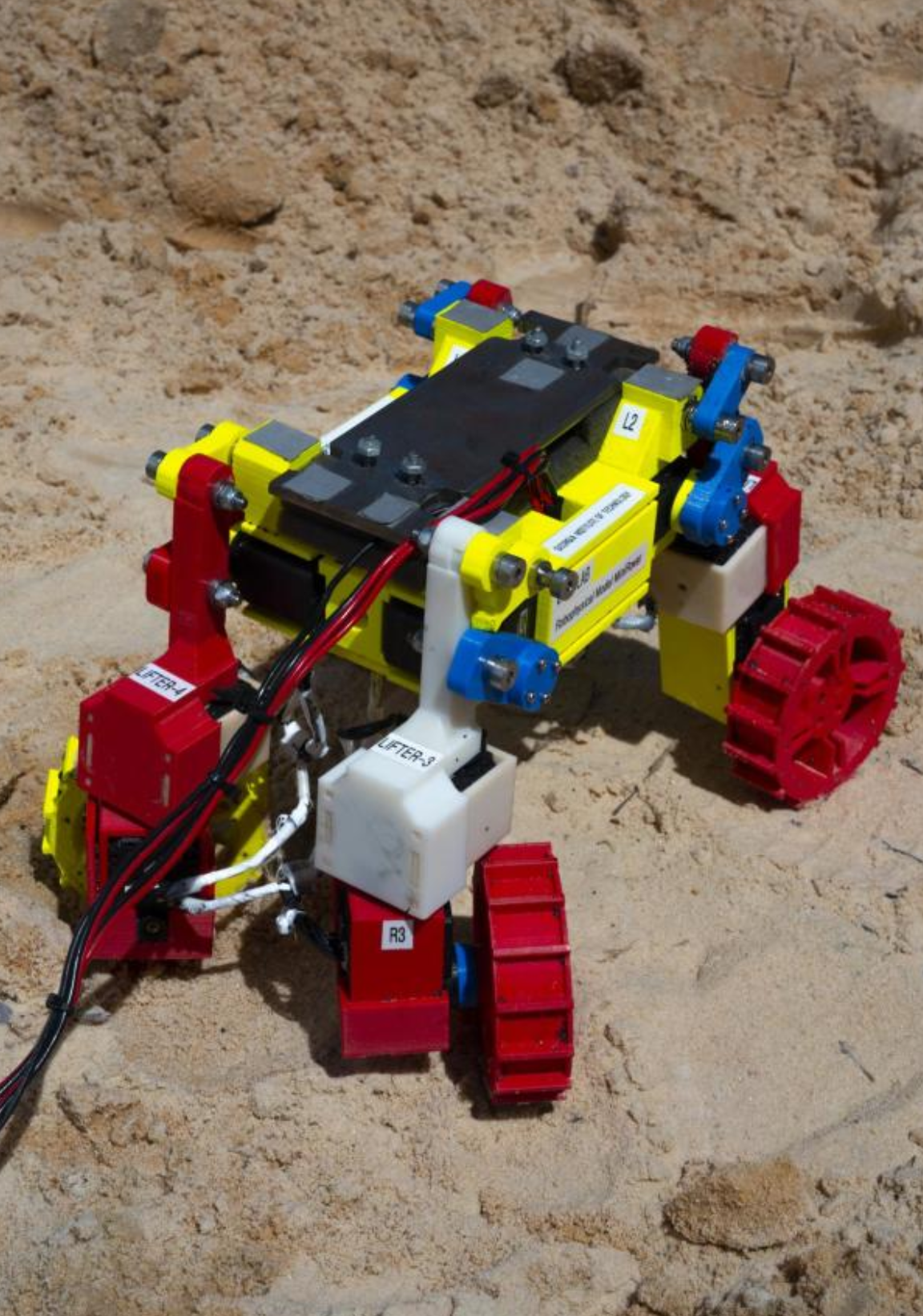
조지아공대 연구팀이 최근 오르기 힘든 가파른 언덕이나 바퀴가 빠지기 쉬운 토양을 지나가는 방법을 연구하기 위해 프로토 타입 로버를 개발했다.(사진=사이언스 뉴스)
Planetary Exploration Rover Avoids Sand Traps with “Rear Rotator Pedaling”
The rolling hills of Mars or the moon are a long way from the nearest tow truck. That’s why the next generation of exploration rovers will need to be good at climbing hills covered with loose material and avoiding entrapment on soft granular surfaces.
Built with wheeled appendages that can be lifted and wheels able to wiggle, a new robot known as the “Mini Rover” has developed and tested complex locomotion techniques robust enough to help it climb hills covered with such granular material – and avoid the risk of getting ignominiously stuck on some remote planet or moon.
View full text
https://news.gatech.edu/2020/05/13/planetary-exploration-rover-avoids-sand-traps-rear-rotator-pedaling
edited by kcontents
조지아공대(Georgia Institute of Technology) 연구팀이 이 같은 문제를 해결하기 위해 마치 헤엄치듯 바퀴를 움직여 험난한 지형을 횡단할 수 있는 ‘미니 로버’를 개발했다고 사이언스 뉴스 등 매체들이 보도했다. 이 로버는 4개의 바퀴를 위 아래로 움직이면서 주변에 있는 모래 등을 쓸어내 움직인다. 이번 연구 결과는 지난 13일 국제 학술지인 ‘사이언스 로보틱스(Science Robotics)’에 게재됐다.
new atlas
edited by kcontents
연구팀은 이 소형 플라스틱 로버가 실험실에서 진행된 테스트에서 느슨한 곡물 언덕을 지나가는 데 성공했다고 밝혔다. 연구팀은 달과 비슷한 토양을 모사한 양귀비 씨로 채워진 박스를 기울여 테스트를 진행했다. 처음엔 바퀴를 얕은 경사로 돌리기 만해도 씨앗에 파묻혀 옴짝달싹도 못했지만, 바퀴를 회전시켜 주변을 쓸어내면 얕은 경사면에서도 앞으로 나아갈 수 있었다는 설명이다.
물론 약 15도 정도 가파른 경사도를 오르기 위해선 이와는 다른 전략이 필요했다. 앞 바퀴가 회전하면서 자기 아래에 있는 씨앗을 뿌리는 동시에 뒷 바퀴는 노를 젓듯 움직이며 뒤쪽으로 씨앗을 보냈다. 이를 통해 언덕의 경사를 효과적으로 낮출 수 있었다는 지적이다. 연구팀은 앞으로 해당 기술을 실제 탐사용 로버에 적용하면 물얼음과 같은 자원을 찾기 위해 달 극의 부드러운 토양으로 이뤄진 경사나 이와 유사한 지역을 탐험하는 게 가능할 것이라고 설명했다.
조상협 robot3@irobotnews.com 로봇신문사
kcontents
