



세계 삼림 재건 로봇 경비대원 VIDEO: Robot rangers designed to rehabilitate the world’s forests




자연과 기술을 융합한 로봇 레인저
이스라엘 산업 디자인 학생인 세게프 카스피(segev kaspi)는 센카르(Shenkar) 대학에서 그의 졸업 프로젝트를 위한 로봇 포리스트의 재건을 개념화했다. '산림 관리인 드루이드'는 종자 심기와 데이터 분석을 포함한 역할을 하며, 산림 재녹화 노력과 지속 가능한 산림 관리를 지원하기 위해 고안되었다.
자연과 기술이라는 두 개의 대립되는 세계를 하나로 합친 카스피는 증가하는 대기 중 이산화탄소에 대한 대화를 자극하고 숲을 재건하는 동시에 이 문제에 대한 가능한 해결책을 제안하는 것을 목표로 한다.
청크, 딕슨 및 릭코
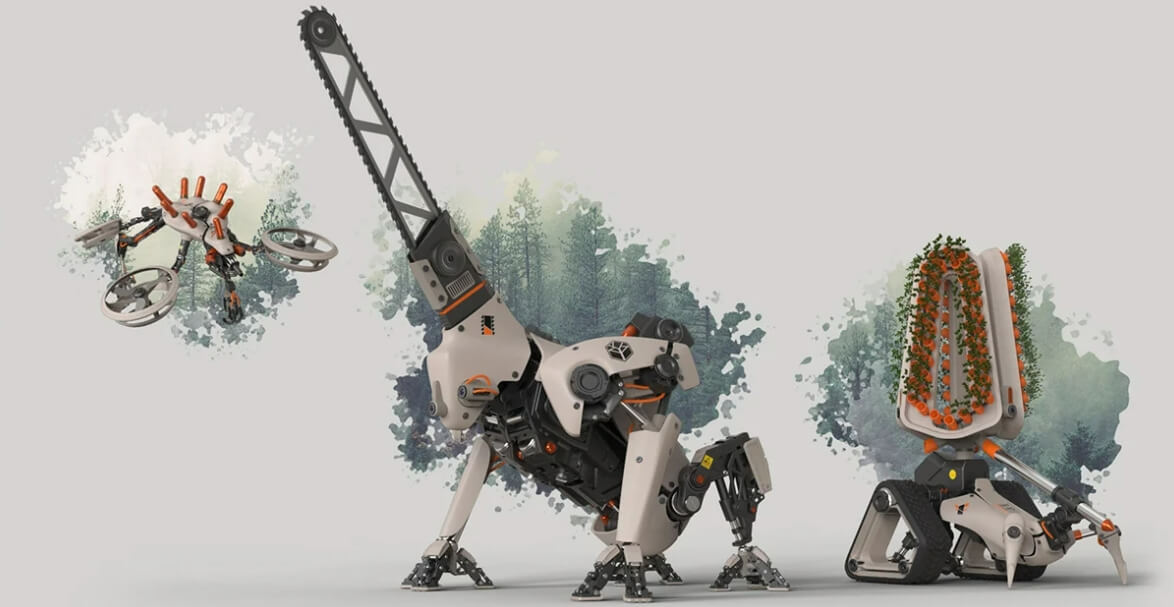
로봇 포리스트는 숲의 필요에 따라 변화하는 시스템에서 작동하며 개별적으로 또는 그룹으로 작업할 수 있다.
각 로봇에는 포리스트를 관리하고 보존하는 데 정의된 역할이 할당된다. 그들의 역할과 디자인 언어는 이 중요한 일을 깊이 이해하려는 시도로 경비원들의 일을 연구하는 긴 과정을 반영한다



첫 번째 로봇은 톱질, 가지치기, 이삭을 담당하는 '사냥꾼'이다. 그리고 묘목과 꺾꽂이의 심기와 재림을 돌보는 '딕슨'이 있다. 마지막이지만 중요한 것은 숲으로부터 데이터를 수집하고, 감시하고 분석하는 '리코'이다.
카스피는 드로잉, 컴퓨터 렌더링, 물리적 모델을 통해 이 세 개념의 로봇에 생명을 불어넣었다.


황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
(Source:
Forest Ranger Druids - פרויקט גמר המחלקה לעיצוב תעשייתי | שגב כספי
kcontents
