



MIT , 숨겨진 물체 감지 식별 로봇손가락 개발 VIDEO:Digger Finger senses and identifies hidden objects




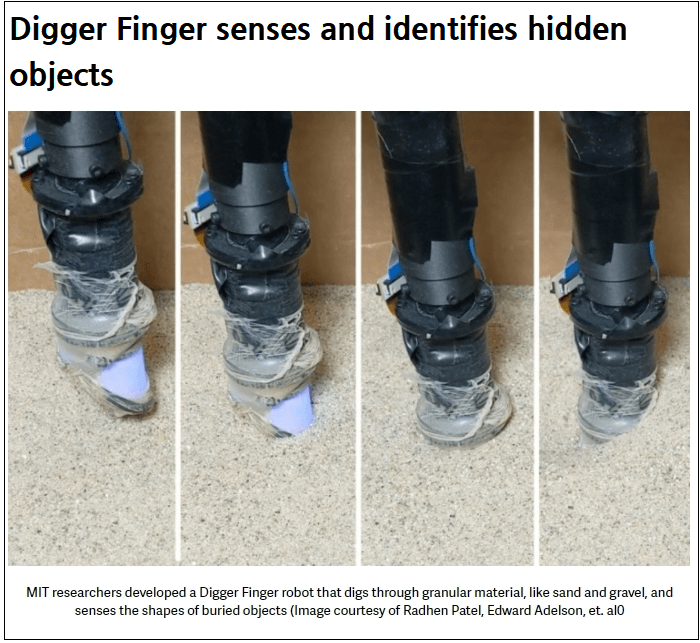
MIT 연구원들이 묻힌 물체를 식별할 수 있도록 촉각 감지가 가능한 뾰족한 로봇 손가락인 디거 핑거를 개발했다.
https://www.theengineer.co.uk/digger-finger-mit-granular-material-sand-rice/
실험에서 디거 핑거는 모래나 쌀과 같은 세밀한 것들을 파헤치며 물건의 모양을 정확하게 감지했다. 연구원들은 이 로봇이 언젠가는 매설된 케이블을 찾거나 매설된 폭탄을 해체하는 것과 같은 다양한 지하 임무를 수행할 수도 있다고 말했다.
이 연구는 다음 국제 실험 로봇 심포지엄에서 발표될 예정이다. 이 연구의 주요 저자는 MIT의 컴퓨터 과학과 인공지능 연구소의 박사인 Radhen Patel이다. 공동저자로는 CSAIL 박사과정 학생 브랜든 로메로, 하버드대 박사과정 학생 낸시 오양, CSAIL의 존·도로시 윌슨 비전과학 교수와 뇌 인지과학부 교수 에드워드 아델슨이 있다.
이 휴대용 표면 캡처 도구는 법의학에서 사용될 수 있다
지상 침투 레이더와 초음파는 매몰 물체를 식별하는 데 사용될 수 있지만, 이러한 기술은 그것들을 흐릿하게 보여준다.
"그러므로, 이 연구는 촉감이 좋고 그것이 느끼는 다양한 것들을 구별할 수 있는 손가락을 만드는 것이다,"라고 Adelson은 말한다. "예를 들어, 매몰된 폭탄을 찾아 불능화하려는 경우 도움이 될 것이다."
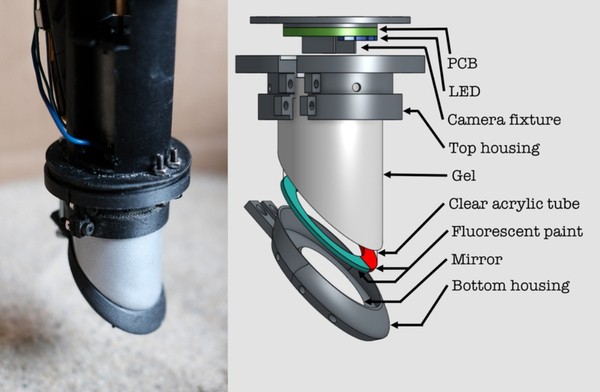
앞서 연구진은 물체가 눌리면 변형되는 반사막으로 덮인 투명한 젤로 구성된 겔사이트라는 촉각센서를 사용했다. 그 막 뒤에는 세 개의 컬러 LED 조명과 카메라가 있었다. 빛이 겔을 통과해 막 위로 비추는 동안 카메라는 막의 반사 패턴을 수집했다. 그런 다음 컴퓨터 비전 알고리즘은 부드러운 손가락이 물체에 닿는 접촉 영역의 3D 모양을 추출했다. 겔사이트는 뛰어난 인공 촉감을 제공했지만 부피가 컸다고 한다.
황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
kcontents
