



보스턴 다이내믹 스팟 로봇의 건설 공사관리에의 활용 VIDEO: Boston Dynamics robot dog used to inspect construction work at Virginia Tech




버지니아 공대 연구원들이 대학 건설 현장에 자율 로봇 스팟을 이용해 공사 진행 상황을 모니터링하는 응용 프로그램을 연구하고 있다.
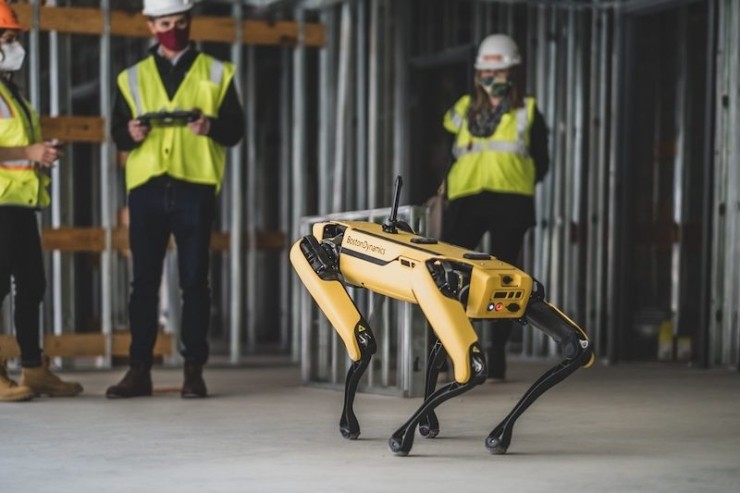
건축도시대학과 공학대학 내에 있는 마이어스 로슨 건축대학 교수와 학생들은 보스턴 다이내믹스가 개발한 이동식 로봇 개 스팟을 배치하기 위해 캠퍼스 기획 인프라 시설 및 산업 스폰서 프로콘 컨설팅과 제휴했다.

현재 진행 중인 실험 조사는 전통적으로 인간 의존적이고 노동 집약적이며 오류가 발생하기 쉬운 공정인 건설 진행 모니터링이 자율 로봇 기술을 활용하여 건설 환경에서 체계적인 데이터 수집을 이끌어냄으로써 개선될 수 있는지를 조사하고 있다.
"이번 연구의 목표는 건설현장에서 로봇의 실현 가능성을 보고 어떠한 어려움이 있는지 평가하는 것이다. 건설현장은 극도로 역동적인 환경으로, 로봇에 대한 인간 및 물리적 탐색 장벽이 진화하고 있다. 센서 등 제어장치를 구현해 효과와 안전성을 높이기 위해 자율로봇의 운행제한 폭을 중심으로 추가 조사가 필요하다.
현장에서는 건설 관리 학생과 연구원이 원격 제어를 통해 Spot을 연구했다. 이들은 스팟 위에 장착된 카메라와 홀로빌더 공사 모니터링 앱을 이용해 360도 사진 수백 장을 촬영했다.
데이터 수집 프로세스를 자동화하기 위해 2D 평면도가 앱에 로드되고 운영자가 데이터를 수집할 위치를 표시한다. 운영자는 향후 사용을 위해 앱 내에서 로봇의 탐색 경로도 기록한다. 앱 내에서 수집된 데이터는 정확성을 위해 분석되고 모든 프로젝트 관계자들 간에 전달된다.
Spot to Virginia Tech를 도입하는 학계, 운영계 및 민간 업계 간의 고유한 협업은 연구 자체만큼이나 혁신적인 작업이다.
"우리가 개인적으로 이 연구를 수행할 수도 있었지만 버지니아 공대와의 파트너십을 추진하는 데에는 여러 가지 이유가 있다. 대학은 기술의 효과와 유용성을 엄격하게 연구할 수 있는 강력한 제도적 능력을 제공한다. 우리의 의도는 버지니아 공대와의 장기적인 협력을 발전시켜 새로운 기술을 지속적으로 조사하고 다양한 아키텍처, 엔지니어링, 건설 및 운영 기술 솔루션 간의 상호 운용성을 향상시키는 로봇, 자동화 및 정보 시스템 표준의 개발을 장려하는 것이다."라고 Stev는 말했다.
"프로콘의 두 공동 설립자는 또한 자랑스러운 버지니아 공대 졸업생이다. 우리는 차세대 건설 리더들에게 투자할 것을 굳게 믿는다. Spot과 같은 신흥 기술을 학생들의 손에 맡기는 것도 향후 몇 년 동안 건설 인재 파이프라인을 육성하는 데 도움이 될 수 있는 한 가지 방법이다."
황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
Foster + Partners adopts Spot the Boston Dynamics robot dog
kcontents
