



서울대, 종이처럼 얇은 수중 소프트 로봇 개발 VIDEO:Underwater maneuvering of robotic sheets through buoyancy-mediated active flutter




Underwater maneuvering of robotic sheets through buoyancy-mediated active flutter
ProfileJaeyoung Yoon4, View ORCID ProfileWoongbae Kim1,2, View ORCID ProfileByeongmoon Lee4, View ORCID ProfileYongtaek Hong4 and View ORCID ProfileKyu-Jin Cho1,2,*
Science Robotics 21 Apr 2021:
|
Abstract Falling leaves flutter from side to side due to passive and intrinsic fluid-body coupling. Exploiting the dynamics of passive fluttering could lead to fresh perspectives for the locomotion and manipulation of thin, planar objects in fluid environments. Here, we show that the time-varying density distribution within a thin, planar body effectively elicits minimal momentum control to reorient the principal flutter axis and propel itself via directional fluttery motions. We validated the principle by developing a swimming leaf with a soft skin that can modulate local buoyancy distributions for active flutter dynamics. To show generality and field applicability, we demonstrated underwater maneuvering and manipulation of adhesive and oil-skimming sheets for environmental remediation. These findings could inspire future intelligent underwater robots and manipulation schemes.
|
https://robotics.sciencemag.org/content/6/53/eabe0637
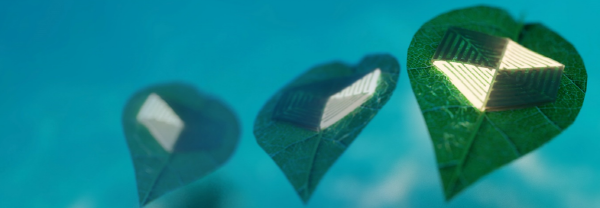
상단 이미지 설명
(나뭇잎의 팔랑거리는 낙하운동에서 영감을 받아 제작된 헤엄치는 나뭇잎 로봇의 모식도)
서울대학교 공대 기계공학부 조규진(인간중심 소프트로봇기술연구센터장) 교수 공동 연구팀이 종이처럼 얇은 수중 소프트 로봇 기술을 개발했다고 22일 밝혔다.
연구진은 얇은 피부 형태의 밀도 분포 제어 기술을 개발하여 종이처럼 얇은 구조의 새로운 수중 거동 형태를 만들어내는 데 성공했다. 이 성과는 수중 소프트 로봇의 새로운 형태와 기능성을 제시한 연구로 인정받아 로봇 분야 세계적 권위지인 '사이언스 로보틱스(Science Robotics)'에 4월 21일 자로 게재됐다.
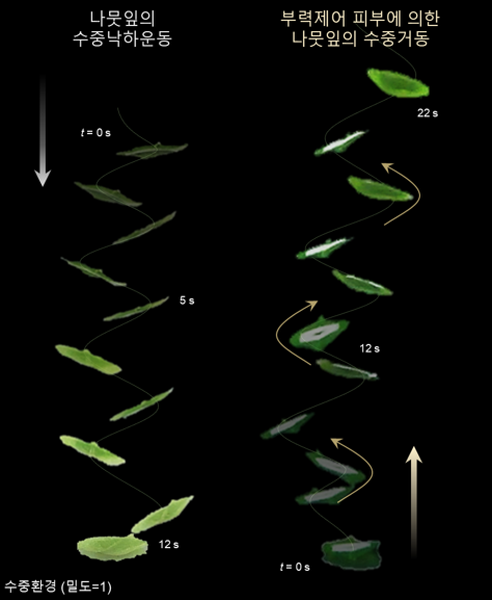
연구진은 일상적으로 누구나 쉽게 접할 수 있는 현상인 ‘나뭇잎이 공기 중에서 팔랑이며 낙하하는 운동’에서 핵심 원리에 대한 영감을 얻었다. 나뭇잎 또는 종이와 같이 가볍고 얇은 물체는 공기 저항에 의해 특별한 추진력 없이도 다채로운 움직임을 만들어낸다.
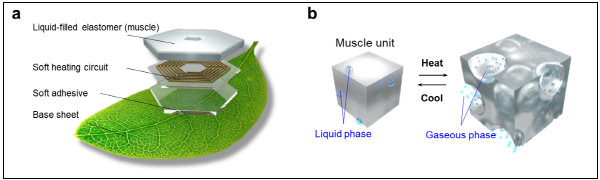
연구진은 이 움직임이 물체의 밀도 분포에 크게 의존하고, 수중 환경에서는 이 효과가 한층 더 극대화되는 점을 규명했다. 더 나아가 열에 반응하면 큰 폭으로 밀도가 변하는 연성 복합재료를 피부처럼 얇게 패터닝함으로써 전체 시스템의 밀도 분포를 능동적으로 제어하는 데 성공했다. 이 밀도 분포 제어 기술은 몸체의 극심한 변형 또는 프로펠러와 같은 추진기 없이도 종이처럼 얇은 임의의 구조가 나뭇잎이 팔랑거리는 듯한 수중 거동을 하며 원하는 위치로 이동할 수 있게 만들었다.
연구책임자인 서울대 조규진 교수는 “이 연구는 얇은 소프트 로봇이 수중에서 나뭇잎의 움직임과 유사한 새로운 형태의 거동을 할 수 있는 개념을 처음으로 보여준 연구로 앞으로 이 개념을 발전시켜 나간다면 해양 오염, 쓰레기 등을 제거할 수 있는 새로운 형태의 수중 소프트 로봇을 개발할 수 있는 가능성을 보여주었다”라고 전하며 연구의 의의를 밝혔다.
이번 연구는 한국연구재단의 선도연구센터 사업 및 기초연구사업 학문후속세대양성 사업의 지원을 받아 수행됐다.
장길수 ksjang@irobotnews.com 로봇신문
http://www.irobotnews.com/news/articleView.html?idxno=24649
New Underwater Soft Robots Inspired by Falling Leaves
kcontents
