



몸이 불편한 사람을 먹여주기까지 하는 식사보조 로봇 Building a Precise Assistive-Feeding Robot That Can Handle Any Meal




스탠포드 대 컴퓨터 공학과 연구팀
척추 부상이나 다른 유형 운동 장애 가진 사람들에 유용
식사를 하는 것은 접시에서 입으로 음식을 가져오는 여러 가지 정확한 움직임을 포함한다.
포크나 스푼을 잡고 다양한 모양과 질감을 가진 다양한 음식들을 깨부수거나 접시에서 밀어내지 않고 꼬거나 떠 올린다. 그런 다음 음식을 떨어뜨리지 않고 운반하여 편안한 각도로 입에 넣고 깨물고 음식을 남길 수 있을 정도의 힘으로 기구를 부드럽게 꺼낸다. 그리고 하루에 세 번씩 접시가 깨끗해질 때까지 이 일련의 행동을 반복한다.
척추 부상이나 다른 유형의 운동 장애를 가진 사람들에게, 도움 없이 이러한 일련의 움직임을 수행하는 것은 거의 불가능할 수 있다. 즉, 먹기 위해 간병인에게 의존해야 한다는 것을 의미한다. 이것은 개인의 자율성을 감소시키는 동시에 간병인의 번아웃에도 기여한다고 스탠포드 대학의 컴퓨터 공학 대학원생인 Jennifer Grannen은 말한다.
NEC, 세계 최초 탄소나노튜브 활용 '고감도 무냉각 적외선 이미지센서' 개발 NEC develops the world's fir
구조물 구성요소 배열하여 640 x 480 픽셀 고화질 무냉각 적외선 이미지 센서 만들어 어둠 속에서도 사람과 물체 방출 적외선 감지 NEC 주식회사(NEC; TSE: 6701)가 세계 최초로 고순도 반도체 탄소 나
conpaper.tistory.com
대안:
장애를 가진 사람들이 스스로 먹고 살 수 있도록 도울 수 있는 로봇. 비록 이미 시장에 로봇 급식 장치가 있지만, 그것들은 일반적으로 미리 프로그램된 동작을 하고, 각 사람과 각 식사에 맞게 정확하게 설치되어야 하며, 음식을 그것 안으로 들여오기보다는 사람의 입 앞에 있는 위치로 가져와야 하는데, 이것은 매우 제한적인 움직임을 가진 사람들에게 문제를 일으킬 수 있다고 Grannen은 말힌다.
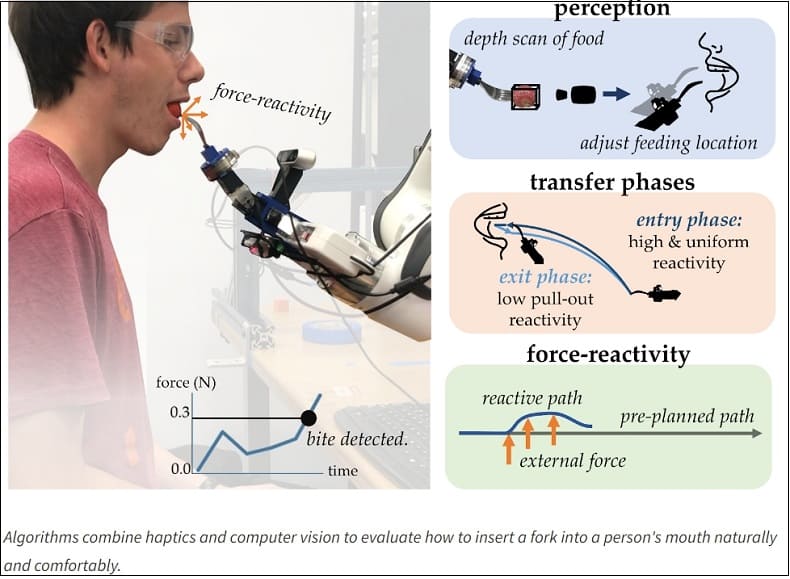
그란넨과 동료 컴퓨터 과학 학생인 프리야 선다레산, 수넬 벨칼레, 일린 우, 로렌조 샤이케비츠를 포함한 도르사 사디의 ILIAD 연구실의 연구팀은 로봇 보조 급식을 관련된 모든 사람들이 더 편안하게 사용할 수 있기를 기대하고 있다. 팀은 이제 다양한 종류의 음식에 대한 먹이 공급 과정의 각 단계를 자율적이고 편안하게 달성하기 위한 몇 가지 새로운 로봇 알고리즘을 개발했다. 한 알고리즘은 음식물에 포크를 삽입하는 각도와 속도를 평가하기 위해 컴퓨터 비전과 햅틱을 결합한다. 다른 알고리즘은 두 번째 로봇 팔을 사용하여 음식물을 숟가락에 밀어 넣는다. 그리고 세 번째 알고리즘은 자연스럽고 편안한 방식으로 음식물을 사람의 입으로 전달한다.
"희망은 이 분야에서 발전함으로써 간병인 지원에 의존하는 사람들이 결국 더 독립적인 생활을 할 수 있게 되는 것이다."라고 순다레산은 말한다
Visual and Haptic Skewering
Scooping with a Push
Bite Transfer
시각적 및 촉각적 도구
밀어서 푸기
물어서 보내기
황기철 콘페이퍼 에디터 국토부 인플루언서
Ki Chul Hwang Conpaper editor influencer
Building a Precise Assistive-Feeding Robot That Can Handle Any Meal
(Source: hai.stanford.edu/news/building-precise-assistive-feeding-robot-can-handle-any-meal)
Meet Obi - Adaptive Eating Device [Assistive Technology]
kcontents.
