



4족 보행 로봇이 2족 보행으로 바뀔 때 VIDEO: Multi-Modal Legged Locomotion Framework with Automated Residual Reinforcement Learning




Construction, Science, IT, Energy and all other issues
Search for useful information through the top search bar on blog!
건설,과학,IT, 에너지 외 국내외 실시간 종합 관심 이슈 발행
[10만이 넘는 풍부한 데이터베이스]
블로그 맨 위 상단 검색창 통해 유용한 정보를 검색해 보세요!
4족보행 로봇 2족보행을 바꾸는 혁신적인 신들 간단한 기술은 4족보행 로봇을 팔이 있는 2족보행 로봇으로 바꾼다.
사족이라는 단어는 엄밀히 말하면 "4개위 다리"를 의미한다. 로봇공학자는 이 용어를 4개의 사지를 사용하여 걷는 모든 것에 적용하는 경향이 있으며, 대신 2개의 사지로 걷는 이족보행 로봇과 구별된다. 하지만 로봇공학이나 생물학에서 뭔가 (예를 들어) 조작해야 할 때 네발달린 동물에서 두발달린 동물로 전환할 수 있는 거대하고 흐릿한 교차점이 있다.
네발 달린 로봇을 네발 달린 로봇으로 단순하게 본다면, 그들은 훨씬 더 다재다능해 보이지만, 그러한 전환은 까다로운 것일 수 있다. 지난주 일본 교토에서 열린 2022 IEEE/RSJ 지능형 로봇 및 시스템 국제회의(IROS 2022)에서 매사추세츠주 우스터폴리텍연구소(WPI)와 상하이공대 연구진은 기성 4족 보행 로봇이 일부 영리한 소프트웨어와 기술로 2족 보행할 수 있는 일반화 방법을 제시했다.
우리는 이전에 4족보행에서 2족보행으로 전환할 수 있는 로봇을 본 적이 있지만, 그들은 거의 항상 이것을 할 수 있도록 매우 신중하게 설계되었고, 무게, 복잡성, 그리고 비용 면에서 위약금을 지불한다. 이 연구의 독특한 점은 이 기술이 모든 4족 보행자에게 적용되도록 고안되었다는 것이다. 아주 작은 하드웨어만 있으면 4족 보행자도 2족 보행자가 될 수 있다.
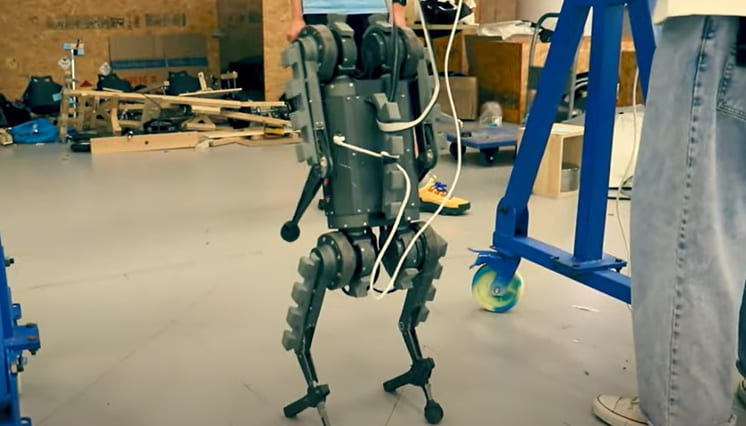
이 이족보행화의 기계적인 측면은 3D 프린팅된 막대기로, 네발동물의 각 뒷다리의 정강이에 설치된다. 정강이를 부착하지 않으면 로봇이 안정적으로 서거나 걸을 수 있도록 추가적인 지원을 제공한다. 이 기능은 로봇이 일어설 때 특히 유용하다. 이 과정에서 무게 중심이 완전히 지지되기 때문이다. 이 비디오는 미니 치타 로봇처럼 보이는 곳에서 작업하는 것을 보여주지만, 다시 말하지만, 플랫폼은 몇 가지 기본적인 요구 사항을 충족하는 한 정말로 중요하지 않다.
황기철 콘페이퍼 에디터 국토부 인플루언서
Ki Chul Hwang Conpaper editor influencer
Multi-Modal Legged Locomotion Framework with Automated Residual
Reinforcement Learning
(Source:
https://spectrum.ieee.org/quadrupedal-robot-shins-turns-biped)
