



건설 작업별 세 가지 유형의 로봇 VIDEO: Three Types of Robots in Construction And Manufacturing For Multiple Tasks




Construction, Science, IT, Energy and all other issues
Search for useful information through the top search bar on blog!
건설,과학,IT, 에너지 외 국내외 실시간 종합 관심 이슈 발행
[10만이 넘는 풍부한 데이터베이스]
블로그 맨 위 상단 검색창 통해 유용한 정보를 검색해 보세요!
목차
1.고정형 로봇
1.갠트리 로봇
1.로봇 팔 (관절 로봇)
1.케이블 로봇
2.모바일 로봇
2.바퀴 달린 모바일 로봇
2.걸어다니는 모바일 로봇
2.하늘을 나는 모바일 로봇
2.수중용 모바일 로봇
3. 군집 로봇
Three Types of Robots in Construction And Manufacturing For Multiple Tasks
건설 제조 등에 있어서 작업별 세 가지 유형의 로봇
20세기 들어 건설과 건축에서 로봇의 역할이 크게 커지면서 건축의 한계를 뛰어넘고 있다. 로봇 공학이라는 최첨단 분야는 많은 직업의 관심을 끌었다. 오늘날 로봇은 산업, 군사, 가정용, 건축 설계 및 건설 과정에 널리 사용되고 있다.

건축가들과 디자이너들에 의해 집중적으로 조사되는 동안, 로봇 시스템의 발전은 이용 가능한 설계 기술을 크게 변화시켰고, 아키텍처의 한계를 밀어내기 시작했다. 스크립트 작성 경험이 거의 없는 설계자는 KUKA|prc 또는 HAL과 같은 Greeshpper 3D용 특수 플러그인을 사용하여 산업용 로봇을 프로그래밍할 수 있다. 로봇 코드와 디지털 파라미터 설정은 모두 몇 초 이내에 변경될 수 있다.
프로세스가 빠르게 발전하여 최소한의 시간과 노력으로 건축 설계와 그 구체화를 수정하고 개별화할 수 있다. 디지털 제작의 이러한 발전은 건축가가 기술 장치와 상호 작용하는 방식을 근본적으로 바꾸고 디지털 세계와 물리적 세계 간의 상호 작용에 대한 새로운 통찰력을 제공한다.
로봇팔은 건설 로봇을 말할 때 가장 일반적인 로봇 유형으로 여겨진다.
그러나 "로보틱스"라는 용어는 상당히 광범위하며 일반적으로 인간이 수동으로 수행하는 일련의 작업을 자동화하는 기계나 기술 시스템을 가리킨다. 로봇은 센서와 컴퓨터 프로그래밍을 사용하여 특정 동작을 수행하고 명령에 응답하도록 프로그래밍할 수 있는 자율 시스템이다.
그들은 복잡한 일련의 작업을 자동으로 수행할 수 있고, 그들이 실행하도록 학습된 작업을 적응하고 배울 수 있다. 이 로봇들은 규모, 크기, 종류 면에서 적응할 수 있다. 즉, 고정형, 이동형, 군집형 로봇은 수많은 건축 작업을 수행하는 데 도움을 주는 주요 유형이다. 이러한 각 범주에는 일부 하위 범주가 포함될 수도 있다.
건축 및 설계 분야 로봇 제작 프로젝트 상위 5개 항목
열선 절단 기술을 적용한 로봇 제작에 대해 더 알고 싶다면 ZHA 코드 팀이 가르치는 PAACADIUS의 로봇 제작 설계 워크숍을 확인할 수 있다.
1. 고정형 로봇
정지 로봇은 자세를 바꾸지 않고 작동하는 로봇이다. "정지 상태"라는 용어는 로봇이 움직이지 않는다는 것을 의미하지 않습니다. 이는 작동 내내 로봇의 기반이 움직이지 않는다는 것을 의미합니다. 바닥, 천장 또는 다른 표면에 고정된 로봇은 정지된 것으로 간주됩니다. 이러한 로봇을 자동화하는 것은 매우 간단하지만, 작업 공간에 맞는 구조만 만들 수 있다. 이 로봇들은 보통 엔드 이펙터의 위치와 방향을 조작하여 주변을 수정한다.
건설 중인 정지 로봇은 주로 갠트리 로봇, 로봇 팔, 케이블 로봇을 포함한다.
1. 갠트리 로봇

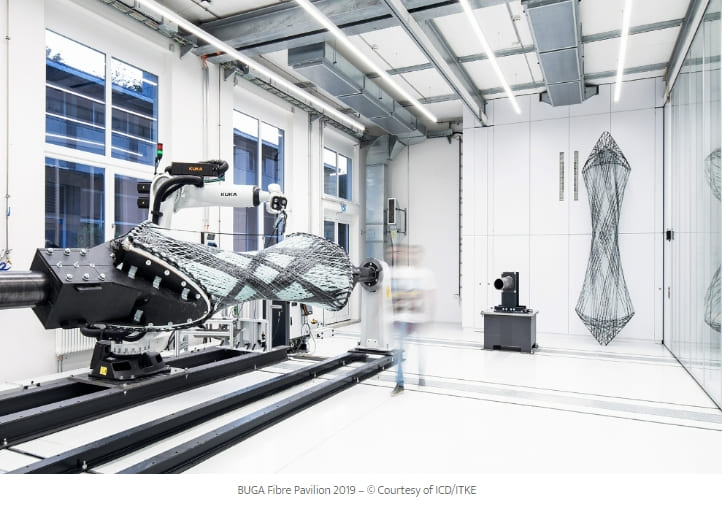
갠트리 로봇은 수평면을 가로질러 움직일 수 있는 조작기가 부착된 오버헤드 시스템이다. 갠트리 로봇은 데카르트 또는 리니어 로봇이라고도 한다. 일반적으로 픽 앤 플레이스 작업, 용접 및 기타 많은 애플리케이션을 위한 거대한 시스템이다. 건설 중인 이 로봇들은 넓은 작업 영역과 더 나은 위치 정확도를 제공한다. 부품을 올바르게 배치하는 로봇의 기능을 위치 정확도라고 한다. 갠트리 로봇은 X, Y, Z 좌표계를 사용하기 때문에 모션 측면에서 프로그래밍이 더 간단하다. 그들은 바닥 공간의 제약에 덜 얽매여 추가적인 이점이다.

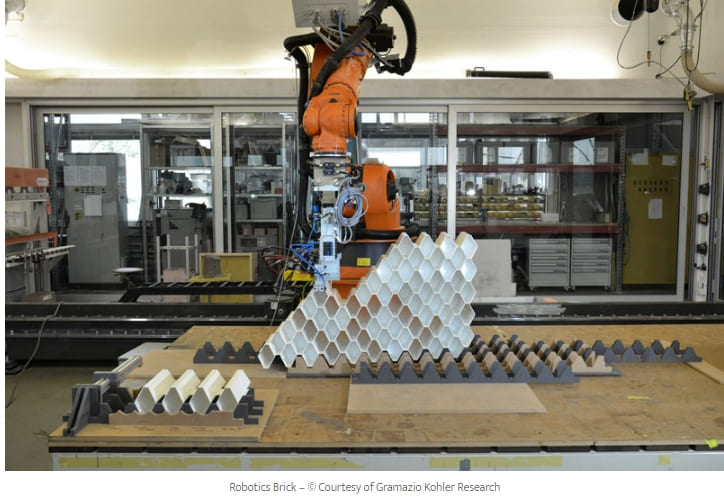
Gramazio Kohler의 연구팀은 공간적으로 연결된 구조의 자동 목재 조인트 조립을 갠트리 로봇을 건설에 사용한 멋진 사례로 다루고 있습니다. 이 프로젝트는 랩 조인트가 있는 구조물을 만들기 위한 맞춤형 컴퓨터 모델링, 시각화 및 타당성 확인 소프트웨어의 혜택을 받는다. 3.4m 높이의 이 구조물은 100x100mm 프로필 목재 요소 40개로 구성되어 있다.
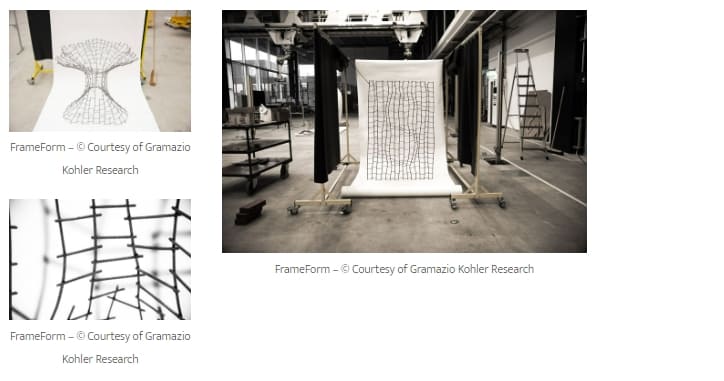
다른 예로, 프레임폼은 구조적으로 건전한 금속 프레임을 설계하기 위한 계산 접근 방식을 제공하는 메쉬 몰드 확장입니다. 그것은 갠트리 로봇을 사용하여 자동화된 막대 굽힘, 용접 및 절단을 통합한다.
1. 로봇 팔 (관절 로봇)
로봇 팔(Robotic Arm)은 제조, 기계, 산업 자동화 로봇의 기반이다. 그들은 자동차 생산 부문의 깊은 기원에서 많은 산업을 위한 종합적이고 유연한 도구로 발전했다. 실제로, 그것들은 건설에서 가장 널리 사용되는 유형의 로봇이다. 그들은 용접, 재료 취급, 용사, 도장, 드릴링과 같은 여러 가지 작업을 수행할 수 있다. 이 로봇들은 관절점이 있는 관절 구조를 가지고 있다. 축으로 알려진 각 추가 조인트는 로봇 암의 운동 범위를 추가합니다. 축이 많을수록 로봇 암의 정확도가 높아질 수 있다.
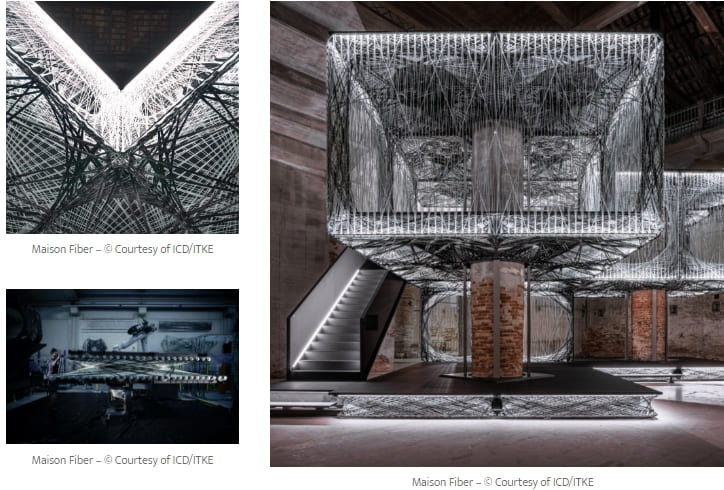
건축에서 로봇 팔을 사용하는 중요한 예는 ICD와 ITKE에 의한 Maison Fiber의 본격적인 다층 건축 설치이다. 구조물은 2.5미터 격자 크기를 사용하여 재구성 가능한 섬유형 바닥 슬래브와 벽으로 구성된다. 섬유벽 및 천장 요소는 코어리스 로봇 와인딩 방법을 사용하여 제작되었으며, 이는 지역적으로 하중 적응 설계 및 섬유 정렬이 가능하여 매우 가벼운 구조를 만들어냈다. 이 프로젝트는 재구성 가능한 건설 부품을 가진 매우 비물질화된 구조의 공간 표현이다.
1. 케이블 로봇

케이블 로봇은 유연한 케이블을 작동기로 사용한다. 각 케이블은 다른 한쪽 끝이 엔드 이펙터에 부착된 상태에서 모터에 의해 꼬인 로터에 감겨 있다. 케이블 구동 로봇은 무거운 짐을 운반하는 동안 넓은 영역에 걸쳐질 수 있는 용량과 다른 종류의 로봇이 할 수 없는 방식으로 구조적으로 기본을 유지하는 등 몇 가지 뚜렷한 특징을 가진 메커니즘이다. 이러한 로봇은 다양한 조작 작업을 실행할 수 있으며 기존의 로봇 조작기에 비해 다양한 이점을 제공할 수 있다. 현재, 제한된 수의 케이블 구동 로봇 시스템이 시장에 나와 있다.
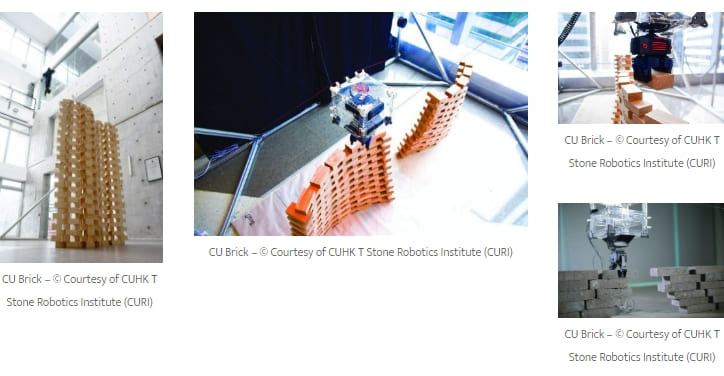
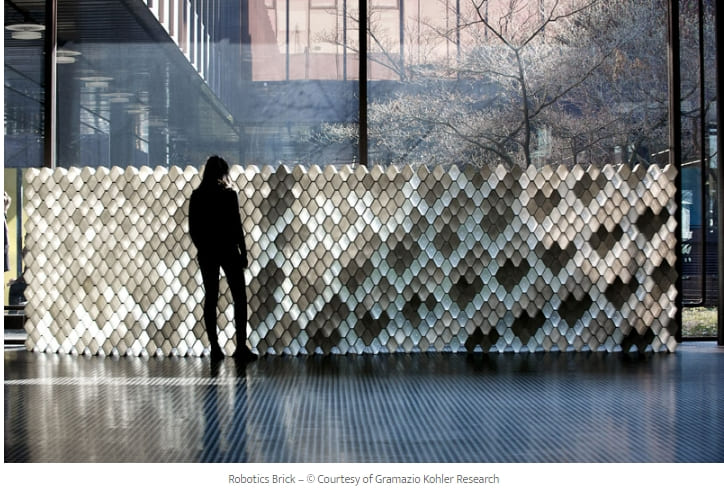
건설 중인 케이블 로봇의 대표적인 예로 'CU-Brick'이 있는데, 이 로봇은 수백 개의 벽돌로 기하학적으로 복잡한 벽돌 구조를 자율적으로 만들 수 있다. 장치는 그리퍼 엔드 이펙터와 케이블 액추에이터로 구성되며, 다양한 설정에서 벽과 지붕을 지지하기 위해 금속 프레임 구조물에 설치될 수 있다.
2. 모바일 로봇
병렬화가 가능하도록 제작 프로세스를 설계하고 모바일 다중 로봇 구축 시스템을 사용하는 것은 건설을 가속화하기 위한 솔루션이지만, 종종 상당한 지원 인프라가 필요하다. 이동성 측면은 상태 추정, 현지화, 환경 인식, 모션 계획 및 제어와 같은 추가 과제를 도입한다. 이러한 환경은 구조화되지 않고 빠르게 변화하기 때문에 건설 현장의 모바일 로봇에게 특히 어려울 수 있다. 모바일 로봇은 건설 현장의 혼란스럽고 끊임없이 변화하는 환경에서 이러한 장애물을 극복하는 것이 특히 어려울 수 있다.
반면에, 갠트리, 로봇 팔 또는 케이블 로봇과 같은 고정 로봇은 상대적으로 자동화하기가 쉽지만, 작업 공간에 맞는 구조만 구축할 수 있다. 반대로, 이동 로봇은 그들의 크기보다 더 큰 구조물을 만들 수 있다. 이러한 로봇을 제조하는 비용과 복잡성은 상당하지만, 고르지 않은 지형에서 얻을 수 있는 이점은 대부분의 애플리케이션에 필수적입니다. 이러한 로봇은 바퀴 달린 이동 로봇, 걷는 이동 로봇, 나는 이동 로봇, 수영하는 이동 로봇으로 분류할 수 있다.
2. 바퀴 달린 모바일 로봇

로봇 이동에 가장 중요한 시스템 중 하나는 바퀴이다. 로봇이 평평하고 견고하지 않은 지형 위를 이동할 때 휠의 활용은 설계, 제조 및 프로그래밍이 더 간단합니다. 다른 솔루션에 비해 휠 제어가 덜 복잡하며 움직이는 표면의 마모와 인열도 적다. 또 다른 이점은 로봇이 일반적으로 표면과 접촉하기 때문에 우려 사항의 균형을 맞추는 데 큰 어려움을 제공하지 않는다는 것이다.
자율 보행 굴착기인 힙은 이러한 로봇의 가장 두드러진 예이다. 힙은 다양한 임무에 사용되는 유압식 굴착기이다. 힙은 2020년 6월 자유형의 제방을 자율적이고 정밀하게 굴착하기 위해 처음 사용되었다. 그것은 또한 불규칙한 모양의 돌로 건조한 돌담을 쌓는 데 사용된다. 이 기계는 돌들을 지도에 그려서, 돌들을 집어 지붕에 장착된 LiDARs 앞으로 옮깁니다. 게다가, 이 로봇은 자율적인 임업 작업에서 나무를 수확할 수 있다.
힙은 반자율 원격 조작과도 호환된다. 여러 대의 카메라를 장착하여, 제2차 세계 대전 당시 실전 탄약이 들어 있는 땅에 참호를 파는데 사용되었는데, 선실에 작업자가 있는 표준 접근 방식은 너무 위험했다.
2. 걸어다니는 모바일 로봇
비록 걷는 로봇이 바퀴 달린 로봇보다 훨씬 더 비싸지만, 다리가 있는 것은 바퀴보다 다양한 이점을 제공한다. 이 로봇들의 가장 큰 장점은 다재다능함과 효율성은 물론 부드럽고 고르지 않은 지형에서도 작동할 수 있어 탁월한 이동성, 에너지 경제, 안정성, 지상에 대한 낮은 효과를 제공한다는 점이다. 보행 로봇은 환경의 장애나 틈새에 빠르게 대처할 수 있다는 장점도 있다. 요컨대, 거친 지형에서의 적응성과 기동성이 그들의 주요 장점이다. 보행 로봇은 다리 수에 따라 여러 종류가 있다. 가장 중요한 것은 이족보행, 네발보행, 여섯발보행 등이다.
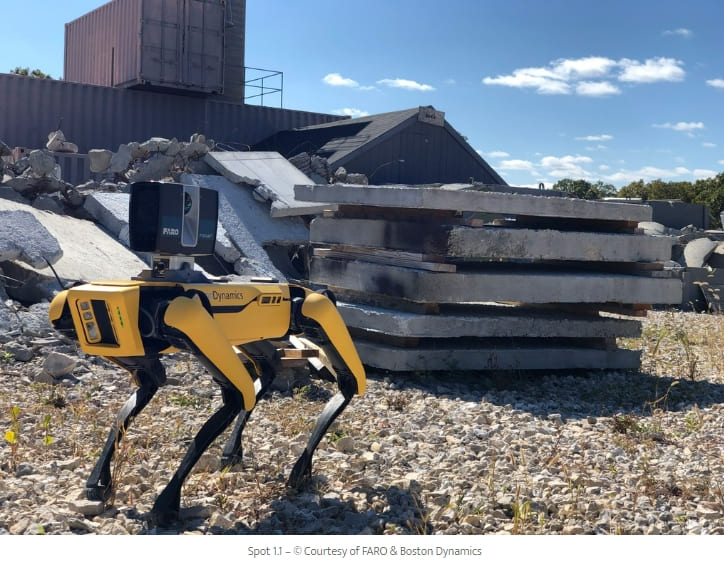
Boston Dynamics의 Spot 1.1은 다리가 네 개인 보행 로봇의 훌륭한 예이다. 이 제품은 놀라운 이동성으로 지형을 처리할 수 있어 정기 검사 작업 및 데이터 수집을 안전하고 정확하며 자주 자동화할 수 있습니다. 스폿은 원격 감지를 기반으로 작동합니다. 사이트를 가로질러 이동하며 생성되는 맵을 기록합니다. 그것은 환경을 통과하는 경로를 기억할 것이고, 그 여정을 인간이 다시 환경을 통해 통제할 필요 없이 자율적으로 반복할 수 있다
2. 하늘을 나는 모바일 로봇
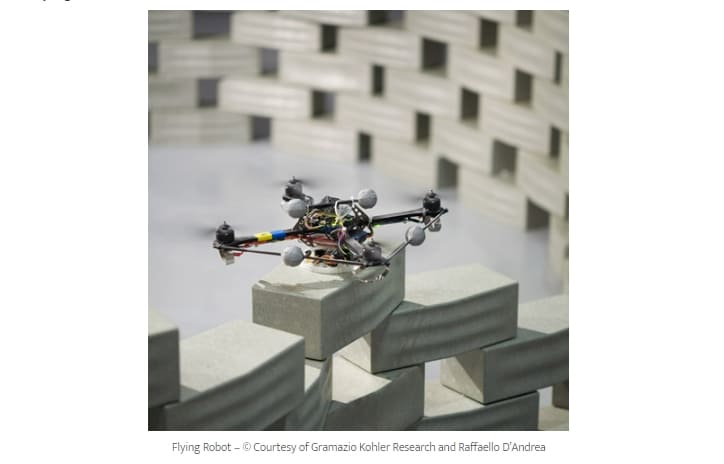
디지털 제작의 영역이 확장되고 있다. 최근의 컴퓨팅, 감지 및 제어의 발전은 구조화되지 않은 환경에서 어려운 건설 작업을 수행할 수 있는 자급자족 비행 기계를 만드는 것을 가능하게 한다. 로봇 건설에 대한 항공 접근에 대한 조사는 현장 건설에 대한 가장 최근의 연구 주제가 되었다. 이 개념은 공중에서 건설 부품을 개조하기 위해 비행체를 사용하는 것을 포함했다. 이것은 지상 이동에 내재된 제약과 비계의 필요성을 제거할 것이다. 건설 중인 날으는 로봇은 비행기나 새/곤충 같은 날개, 프로펠러 또는 풍선을 이용하여 공중을 떠다니며 비행한다.
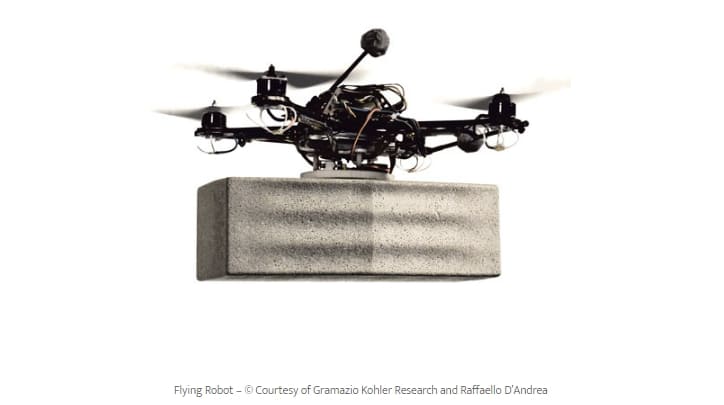
Gramazio와 Kohler의 비행 로봇은 건설에서 비행 로봇의 모범적인 모델이다. 이 로봇들은 프랑스 오를레앙의 FRAC 센터에 6미터 높이의 탑을 설치하는 데 사용됩니다. 이동 로봇은 구조물을 조립하기 위해 1500개의 폴리스티렌 폼 블록을 들어올리고 운반하고 조립한다.
2. 수중용 모바일 로봇
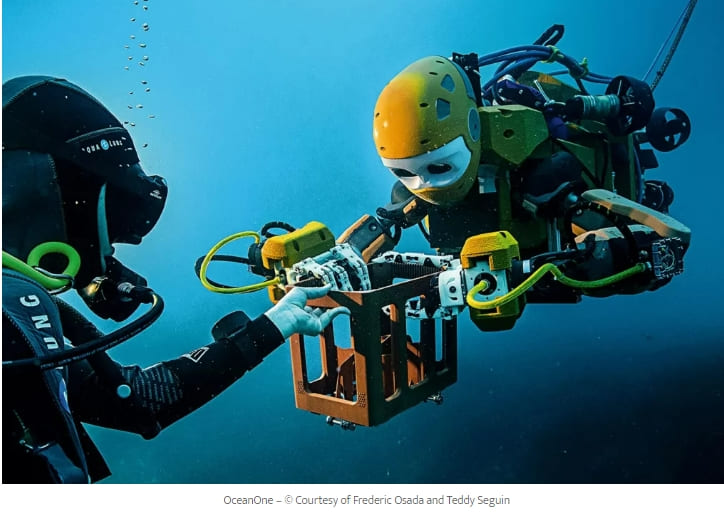
아키텍처에서 널리 보급되지는 않지만 수중 차량 조작 시스템은 모바일 로봇 공학의 필수적인 분야로서 가장 뜨거운 연구 이슈 중 하나이다. OceanOne은 잠수함 로봇의 개념이다. 그것은 해저를 탐험하는 휴머노이드 로봇이다. 그것은 마치 사람처럼 물건을 회수할 수 있는 로봇 손을 가지고 있는 것과 같은 최고의 원격 제어 차량과 휴머노이드 로봇의 장점을 사용한다.
3. 군집 로봇
여러 로봇이 협력하고 작업을 동시에 실행할 수 있는 스웜 로봇 플랫폼은 현재 기술 혁신에 속한다. 건설 중인 군집 로봇은 많은 작은 로봇으로 구성된 로봇 시스템입니다. 건설 중인 이들 로봇은 단일 개체로 기능하지 않고 로봇 모듈이 협력적으로 작동하면서 작동한다. 로봇들은 가능한 한 미리 계획된 충돌 없는 궤도를 따라 움직인다. 로봇들은 충돌을 피한다. 이러한 요구 사항으로 인해, 시스템은 제작 전반에 걸쳐 사용되는 로봇의 수를 변경하고 로봇의 추가, 제거 또는 재사용을 할 수 있다. 시스템은 제작 공정을 연장하지 않고 구조물의 발자국을 가로로 확장하기 위해 완전히 병렬화될 수 있다.
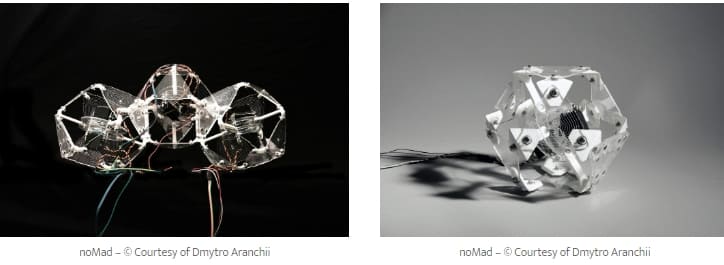
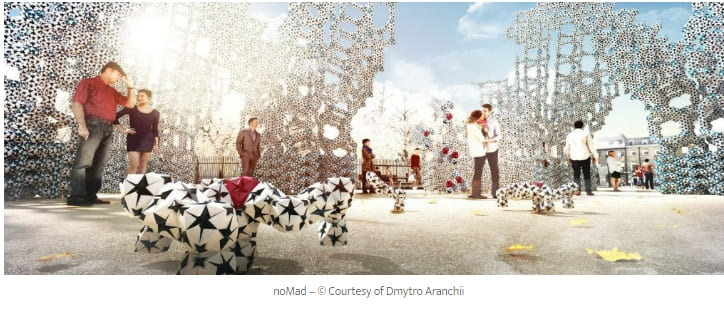
노매드는 군집 로봇 공학의 모범적인 모델 역할을 한다. 건축협회 학생들이 개발한 이 개념은 다양한 형태로 재조정하기 위해 여러 개의 자기 패널에 연결된 작은 모터 단위를 기반으로 한다. 이러한 동력 구성 요소는 확장, 이동 및 회전하여 원시 구조로 조립됩니다. 실제로, 이 개념은 너무 놀라워서 이 작업들 중 어느 것도 사이트에 있는 누구에 의해 통제되지 않는다. 이 개념은 무한히 적응할 수 있는 비한정 모바일 아키텍처에 대한 미래형 아이디어로 간주됩니다.

마찬가지로 MIT에 본사를 둔 '매개매터 그룹'이 개발한 파이버봇은 자신보다 수십 배나 큰 동일한 구조의 다양한 요소를 제조하기 위해 함께 작업하는 유사 로봇 그룹이다. 각 로봇은 섬유와 수지를 감아 상승 및 팽창할 수 있는 자율 복합 튜브를 구축한다. 로봇의 궤적은 계산적으로 만들어진 짜임새 디자인으로 끝나는 인터위빙 튜브를 만들기 위해 조절된다. 이 전체 시스템은 확장 가능하므로 설계 복잡성이나 제조 시간을 크게 늘리지 않고도 더 많은 로봇을 추가할 수 있으며, 자율적이고 현장 고유의 제작 기술에서 확장 가능한 발전을 제공한다.
전망
건설에 효과적인 로봇은 구조화된 환경에서 밝은 미래를 가지고 있다. 로봇은 감각과 지각에 따라 배우고, 적응하고, 행동할 수 있기 때문에 일반적인 건축 장비와는 다르다. 그러나 건축과 건설 분야의 로봇 공학은 아직 초기 단계에 있으며, 미래에는 지금보다 더 큰 역할을 할 것이 확실하다.
이 기사는 건설 중인 로봇의 주요 범주를 다루었다. 로봇의 종류는 각 프로젝트의 요구 사항과 잠재력에 따라 선정될 것이다. 모든 유형의 목표는 다양한 방식으로 인간을 돕는 것이다.
황기철 콘페이퍼 에디터 국토부 인플루언서
Ki Chul Hwang Conpaper editor influencer
(Source:
kcontents
