



로보카들이 구석구석 볼 수 있게 하는 기술 LETTING ROBOCARS SEE AROUND CORNERS




여러 개의 레이더를 동시에 사용하면 자동차들에게 일종의 두 번째 시야를 줄 수 있다.
자율주행차는 등급을 만들기 위해 많은 것을 해야 하지만 의심할 여지 없이 환경을 감지하고 이해하는 것이 가장 중요하다. 자율주행차는 맑은 시야에 있든 숨겨져 있든 날씨가 좋든 나쁘든 많은 물체와 대상을 추적하고 식별해야 한다.

오늘날의 레이더만으로는 전체 작업을 처리할 수 없다. 카메라와 레이더도 필요하다. 하지만 우리가 레이더의 특별한 강점을 최대한 활용할 수 있다면, 최소한 그 보조 센서들 중 일부는 사용하지 않을 수 있을 것이다.
스테레오 모드의 기존 카메라는 실제로 물체를 감지하고, 거리를 측정하고, 속도를 추정할 수 있지만, 그들은 완전 자율 주행에 필요한 정확성을 가지고 있지 않다. 또 밤이나 안개, 직사광선에서는 카메라가 잘 작동하지 않고 이를 사용하는 시스템은 착시현상에 속기 쉽다. 레이저 스캐닝 시스템 또는 레이더는 자체 조명을 제공하기 때문에 악천후에서 카메라보다 우수한 경우가 많다. 그럼에도 불구하고, 그들은 명확한 시야를 따라 곧장 앞을 볼 수 있기 때문에 건물이나 다른 장애물에 가려져 있는 동안에는 교차로에 접근하는 차를 감지할 수 없을 것이다.
레이더는 레이다보다 범위 정확도와 각도 해상도, 즉 서로 구별되는 표적을 다른 표적으로 분해하는 데 필요한 최소 도착각에서 더 나쁘다. 그러나 우리는 이러한 단점을 극복하는 새로운 레이더 아키텍처를 고안하여, 라이더와 카메라 증강에 훨씬 더 효과적이다.
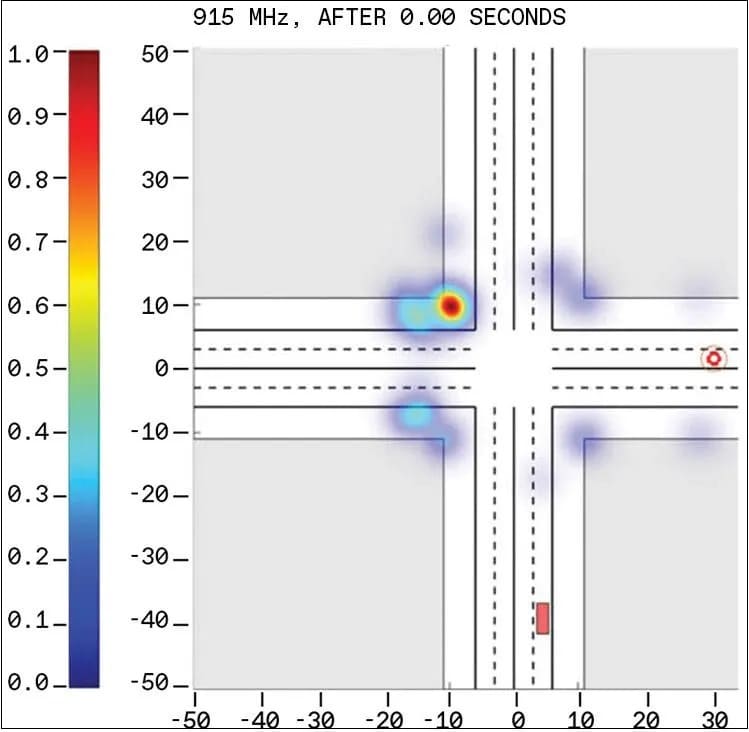
우리가 제안한 아키텍처는 희박하고 넓은 범위의 멀티밴드 레이더를 사용한다. 기본적인 아이디어는 날씨의 변화로부터 시스템을 자유롭게 하고 구석과 주변을 볼 수 있도록 다양한 주파수를 사용하는 것이다.
이 시스템은 차례로 고급 신호 처리 및 센서 퓨전 알고리즘을 사용하여 환경을 통합적으로 표현한다.
우리는 레이더 시스템의 이론적 성능 한계(범위, 각도 해상도 및 정확도)를 실험적으로 검증했다. 지금은 여러 자동차 회사가 평가할 수 있는 하드웨어를 만들고 있는데 최근 도로 주행 테스트는 성공적이었다. 우리는 2022년 초에 코너 감지를 입증하기 위해 더 정교한 테스트를 실시할 계획이다.
주파수 대역마다 장단점이 있다. 77기가헤르츠 이하 대역은 1000m의 짙은 안개를 1데시벨 미만의 신호 세기를 잃지 않고 통과할 수 있다. 50m의 안개 속에서 10~15데시벨을 잃는 라이다와 카메라와 대조해보자.
그러나 비는 다른 이야기이다. 심지어 가벼운 소나기도 77GHz 레이더를 라이다만큼 약화시킨다. 그냥 더 낮은 주파수로 간다. 결국 비는 1GHz 이하에서 레이더에 투명하다.
이 방법은 효과가 있지만 대역이 낮을수록 범위와 각도 해상도가 떨어지기 때문에 대역도 높기를 원할 수 있습니다. 고주파수를 좁은 빔과 동일시할 필요는 없지만 안테나 어레이 또는 고방향 안테나를 사용하여 레이저와 같은 좁은 빔에서 높은 밴드의 밀리미터 길이의 파장을 투영할 수 있습니다. 이것은 이 레이더가 비록 여전히 가시선 밖을 볼 수 없는 같은 어려움을 겪지만, 이 레이더는 라이다 시스템과 경쟁할 수 있다는 것을 의미한다.
황기철 콘페이퍼 에디터 인플루언서
Ki Chul Hwang Conpaper editor influencer
(Source:
https://spectrum.ieee.org/car-radar)
kcontents
