



지하생물 모방한 소프트 지하 굴착 로봇 VIDEO: Robotic burrowing with tip extension and granular fluidization




조지아 공대 메이슨 머레이 쿠퍼, 야스민 오즈칸 아이딘, 에네스 아이딘 연구팀
부드러우면서 속도 빠른 굴착로봇(burrowing robot) 설계
우리는 로봇이 공중으로 날아다니고, 파도 밑으로 잠수하고, 육지에서 온갖 종류의 기술을 수행하는 것을 보아왔다. UC 산타 바바라와 조지아 공과대학의 연구원들은 새로운 개척지, 즉 우리 발 밑의 땅을 탐험하고 있다.
지하 공간을 탐색하기 위해 진화한 식물과 동물로부터 단서를 얻어, 모래를 굴착할 수 있는 빠르고 제어 가능한 부드러운 로봇을 개발했다. 이 기술은 지하에서 빠르고 정밀하며 최소 침습적인 이동을 위한 새로운 응용을 가능하게 할 뿐만 아니라 새로운 유형의 로봇을 위한 기계적 기반을 마련했다.

UCSB 기계공학 교수인 엘리엇 호크스의 대학원생이자 사이언스 로보틱스지의 표지에 실린 논문의 수석 저자인 니콜라스 나클레리오가 "지상을 통과하는 가장 큰 어려움은 단순히 관련된 힘"이라고 말했다.
공기와 물은 그것들을 통해 움직이는 물체에 거의 저항을 주지 않는 반면, 그는 지하세계는 또 다른 이야기라고 설명했다.
"만약 여러분이 땅을 통과하려고 한다면, 흙, 모래 또는 다른 매체를 밖으로 밀어내야 합니다,"라고 Naclerio는 말했다.
다행히 자연계는 지하 네트워크를 구축하는 식물과 균류, 그리고 세분화된 매체를 통해 직접 터널링하는 능력을 터득한 동물의 형태로 지하 항해의 수많은 예를 제공한다.
Daniel Goldman Georgia Tech의 Dunn Family Physics 교수에 따르면, 어떻게 식물과 동물이 지하 항해를 마스터했는지에 대한 기계적인 이해를 얻는 것은 과학과 기술의 많은 가능성을 열어준다고 한다.
골드만은 "다양한 유기체가 세밀한 매체 내에서 성공적으로 헤엄치고 파고드는 원리를 발견하면 그러한 원리를 활용할 수 있는 새로운 종류의 메커니즘과 로봇을 개발할 수 있다"고 말했다.
"그리고 그에 대한 보답으로, 그러한 능력을 가진 로봇의 개발은 새로운 동물 연구에 영감을 줄 수 있을 뿐만 아니라, 세분화된 기질 물리학의 새로운 현상을 지적할 수 있습니다,"라고 그는 말했다.
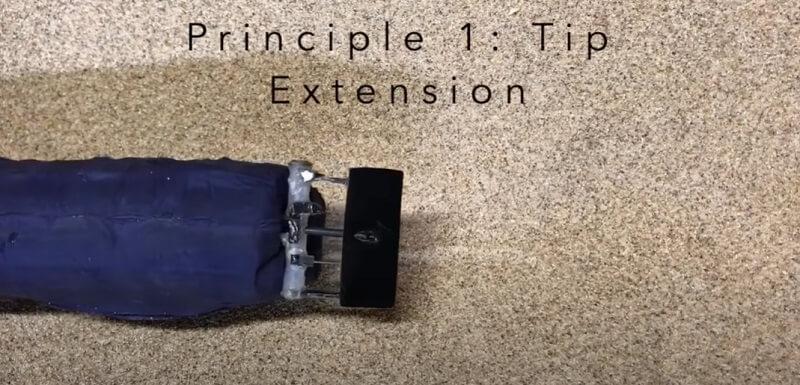
연구원들은 Hawkes Lab에서 디자인된 덩굴처럼 부드러운 로봇으로 좋은 출발을 했는데, 식물과 그들의 끝에서 자라면서 나아가는 방식을 모방하는 것이었고, 나머지는 정지해 있다.
연구원들에 따르면, 지하 환경에서, 이 로봇은 힘을 낮게 유지하며 성장하는 끝까지만 국지적으로 작용한다; 만약 전신이 성장하면서 움직인다면, 로봇이 더 이상 움직일 수 없을 때까지 더 많은 로봇이 모래 속으로 들어갈 때 전체 표면에 마찰이 증가할 것이다.

한편, 동물을 굴착시키는 것은 입자를 액체 상태로 중단시키고 모래나 느슨한 토양에 의해 나타나는 높은 저항 수준을 극복할 수 있도록 하는 세밀한 유체화라고 불리는 추가적인 전략의 영감이 된다.
예를 들어, 남쪽의 산낙지는 땅에서 물 한 방울을 내뿜고, 팔을 이용해 일시적으로 느슨해진 모래 속으로 몸을 끌어당긴다. 그 능력은 연구자들의 로봇에 성장기 바로 앞에 있는 지역으로 공기를 내뿜는 팁 기반의 유량 장치 형태로 전달되어 그 지역으로 이동할 수 있게 되었다.
"우리가 발견한 가장 큰 도전과 해결하는데 가장 오랜 시간이 걸린 것은 수평 굴착으로 전환했을 때, 우리의 로봇은 항상 표면으로 떠오르곤 했다,"라고 Naclerio는 말했다.
그는 기체나 액체가 이동 중인 대칭 물체에 고르게 흐르지만, 유체화된 모래에서는 힘의 분배가 균형을 이루지 못하며 수평 이동 로봇에 상당한 상승력을 발생시킨다고 설명했다. "모래를 압축하는 것보다 위로 밀어 올리고 밖으로 밀어내는 것이 훨씬 더 쉽다,"라고 그는 말했다.
로봇의 거동과 주로 탐사되지 않은 공기 지원 침입 물리학을 이해하기 위해 연구팀은 모래에 수평으로 밀어넣은 고체 로드의 끝에서 다른 각도의 공기 흐름의 결과로 드래그 앤 리프트 측정을 수행했다.
골드만 연구소의 대학원생 연구원인 안드라 카사이는 "세밀한 물질의 마찰력 반응은 뉴턴 유체와는 크게 달라 모래에 침입하면 높은 마찰력으로 인해 운동 방향의 지형이 압축되고 응력이 커지기 때문이다"고 말했다.
"이를 완화하기 위해 침입자로부터 곡물을 들어올리고 밀어내는 저밀도 유체는 종종 그것이 극복해야 할 순 마찰 스트레스를 줄여줄 것입니다,"라고 Karsai는 말했다.
아래로 향하는 유체 제트기가 이동 중인 물체를 들어올리는 가스나 액체와 달리, 모래에서는 아래로 향하는 기류가 상승력을 감소시키고 로봇의 성장 팁 아래 모래를 굴착시켰다.
이를 통해 쐐기 모양의 머리가 아래로 움직이는 것을 선호하는 사생선 도마뱀의 영감과 결합해 연구진은 저항력을 조절하고 로봇이 모래 밖으로 떠오르지 않고 수평으로 계속 움직일 수 있었다.

이와 같은 작고 탐구적이며 부드러운 로봇은 토양 표본 추출, 유틸리티의 지하 설치, 침식 제어 등 건조한 세분화된 매체를 통한 얕은 굴착이 필요한 다양한 응용 분야를 가지고 있다.
팁 익스텐션은 방향을 변경하는 동시에 로봇의 본체가 매체에 얼마나 단단히 고정되어 있는지 조정할 수 있도록 해 주며, 이는 저중력 환경에서 탐사에 유용할 수 있다.
사실, 그 팀은 나사와 함께 목성의 달인 엔셀라두스와 같은 달이나 훨씬 더 먼 육체를 위한 굴착을 개발하기 위한 프로젝트를 진행하고 있다. 호크스는 "굴을 굴착하는 것은 새로운 길을 열어주고 외계 로봇에 새로운 기능을 제공할 수 있는 잠재력을 가지고 있다고 생각한다"고 말했다.
본 논문은 조지아 공과대학의 메이슨 머레이 쿠퍼, 야스민 오즈칸 아이딘, 에네스 아이딘에 의해 연구되었다.
황기철 콘페이퍼 에디터
Ki Chul Hwang Conpaper editor
| |
Robotic burrowing with tip extension and granular fluidization
kcontents
